AdaBoost_Seg
1.0.0
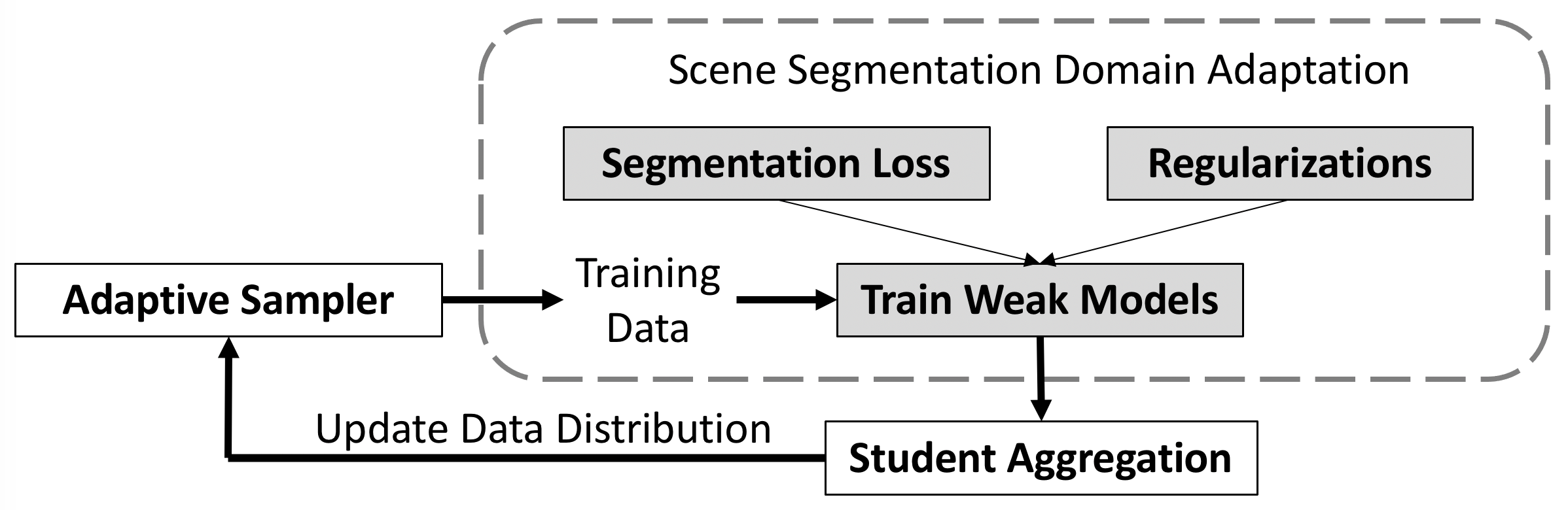 在此儲存庫中,我們提供了論文「域適應的自適應增強:場景分割中的穩健預測」論文的程式碼。
在此儲存庫中,我們提供了論文「域適應的自適應增強:場景分割中的穩健預測」論文的程式碼。
[論文] [中文閱讀]
ucmerced 原來的 DeepLab 連結失效了。請使用以下連結。
[Google雲端硬碟] https://drive.google.com/file/d/1BMTTMCNkV98pjZh_rU0Pp47zeVqF3MEc/view?usp=share_link
[一盤] https://1drv.ms/u/s!Avx-MJllNj5b3SqR7yurCxTgIUOK?e=A1dq3m
或使用
pip install gdown
pip install --upgrade gdown
gdown 1BMTTMCNkV98pjZh_rU0Pp47zeVqF3MEc
當將此方法應用於其他領域時,我們建議根據溫度調整採樣權重以適合您的任務和資料集。本文中我們不改變它,保持為1。
在我們最近的實驗中,我們可以獲得比論文中報告的數字更好的性能 49.72%(MRNet+我們的)。我們認為當聚合模型收斂時,adboost 採樣器更新緩慢,這也會影響效能。如果我們為更新採樣器的最近快照賦予更多權重,效果會更好。
python train_ms.py --snapshot-dir ./snapshots/ReRUN_Adaboost_SWA_SE_GN_batchsize2_1024x512_pp_ms_me0_classbalance7_kl0.1_lr2_drop0.1_seg0.5_swa0_recent --drop 0.1 --warm-up 5000 --batch-size 2 --learning-rate 2e-4 --crop-size 1024,512 --lambda-seg 0.5 --lambda-adv-target1 0.0002 --lambda-adv-target2 0.001 --lambda-me-target 0 --lambda-kl-target 0.1 --norm-style gn --class-balance --only-hard-label 80 --max-value 7 --gpu-ids 0 --often-balance --use-se --swa --swa_start 0 --adaboost --recent下載[GTA5]和[Cityscapes]來運行基本程式碼。或者,您可以從 [SYNTHIA] 和 [OxfordRobotCar] 下載額外的兩個資料集。
下載 GTA5 資料集
下載 SYNTHIA 資料集 SYNTHIA-RAND-CITYSCAPES (CVPR16)
下載城市景觀資料集
下載 Oxford RobotCar 資料集
資料資料夾的結構如下:
├── data/
│ ├── Cityscapes/
| | ├── data/
| | ├── gtFine/
| | ├── leftImg8bit/
│ ├── GTA5/
| | ├── images/
| | ├── labels/
| | ├── ...
│ ├── synthia/
| | ├── RGB/
| | ├── GT/
| | ├── Depth/
| | ├── ...
│ └── Oxford_Robot_ICCV19
| | ├── train/
| | ├── ...
第一階段:(約49.0%)
python train_ms.py --snapshot-dir ./snapshots/ReRUN_Adaboost_SWA_SE_GN_batchsize2_1024x512_pp_ms_me0_classbalance7_kl0.1_lr2_drop0.1_seg0.5_swa0 --drop 0.1 --warm-up 5000 --batch-size 2 --learning-rate 2e-4 --crop-size 1024,512 --lambda-seg 0.5 --lambda-adv-target1 0.0002 --lambda-adv-target2 0.001 --lambda-me-target 0 --lambda-kl-target 0.1 --norm-style gn --class-balance --only-hard-label 80 --max-value 7 --gpu-ids 0 --often-balance --use-se --swa --swa_start 0 --adaboost產生偽標籤:
python generate_plabel_cityscapes.py --restore ./snapshots/ReRUN_Adaboost_SWA_SE_GN_batchsize2_1024x512_pp_ms_me0_classbalance7_kl0.1_lr2_drop0.1_seg0.5_swa0/GTA5_40000_average.pth第二階段(有修正偽標籤):(約50.9%)
python train_ft.py --snapshot-dir ./snapshots/Adaboost_1280x640_restore_ft48_GN_batchsize2_960x480_pp_ms_me0_classbalance7_kl0_lr4_drop0.2_seg0.5_BN_80_255_0.8_Noaug_swa2.5W_t97 --restore-from ./snapshots/ReRUN_Adaboost_SWA_SE_GN_batchsize2_1024x512_pp_ms_me0_classbalance7_kl0.1_lr2_drop0.1_seg0.5_swa0/GTA5_40000_average.pth --drop 0.2 --warm-up 5000 --batch-size 2 --learning-rate 4e-4 --crop-size 960,480 --lambda-seg 0.5 --lambda-adv-target1 0 --lambda-adv-target2 0 --lambda-me-target 0 --lambda-kl-target 0 --norm-style gn --class-balance --only-hard-label 80 --max-value 7 --gpu-ids 0 --often-balance --use-se --input-size 1280,640 --train_bn --autoaug False --swa --adaboost --swa_start 25000 --threshold 97第一階段:
python train_ms_synthia.py --snapshot-dir ./snapshots/AdaBoost_SWA_SY_SE_GN_batchsize2_1024x512_pp_ms_me0_classbalance7_kl0.1_lr2_drop0.1_seg0.5_power0.5 --drop 0.1 --warm-up 5000 --batch-size 2 --learning-rate 2e-4 --crop-size 1024,512 --lambda-seg 0.5 --lambda-adv-target1 0.0002 --lambda-adv-target2 0.001 --lambda-me-target 0 --lambda-kl-target 0.1 --norm-style gn --class-balance --only-hard-label 80 --max-value 7 --gpu-ids 0 --often-balance --use-se --swa --swa_start 0 --adaboost 產生偽標籤:
python generate_plabel_cityscapes_SYNTHIA.py --restore ./snapshots/AdaBoost_SWA_SY_SE_GN_batchsize2_1024x512_pp_ms_me0_classbalance7_kl0.1_lr2_drop0.1_seg0.5_power0.5/GTA5_50000_average.pth第二階段:
python train_ft_synthia.py --snapshot-dir ./snapshots/Cosine_Adaboost_SY_1280x640_restore_ft_GN_batchsize8_512x256_pp_ms_me0_classbalance7_kl0.1_lr8_drop0.1_seg0.5_BN_255_Noaug_t777_swa2.5W --restore ./snapshots/AdaBoost_SWA_SY_SE_GN_batchsize2_1024x512_pp_ms_me0_classbalance7_kl0.1_lr2_drop0.1_seg0.5_power0.5/GTA5_50000_average.pth --drop 0.1 --warm-up 5000 --batch-size 8 --learning-rate 8e-4 --crop-size 512,256 --lambda-seg 0.5 --lambda-adv-target1 0 --lambda-adv-target2 0 --lambda-me-target 0 --lambda-kl-target 0 --norm-style gn --class-balance --only-hard-label 50 --max-value 7 --gpu-ids 0 --often-balance --use-se --input-size 1280,640 --autoaug False --swa --swa_start 25000 --threshold 777 --adaboost --train_bn --cosine第一階段:(約 73.80%)高於紙本。
python train_ms_robot.py --snapshot-dir ./snapshots/Adaboost_SWA3W_Robot_SE_GN_batchsize6_adapative_kl0.1_sam_lr6 --drop 0.1 --warm-up 5000 --batch-size 6 --learning-rate 6e-4 --crop-size 800,400 --lambda-seg 0.5 --lambda-adv-target1 0.0002 --lambda-adv-target2 0.001 --lambda-me-target 0 --lambda-kl-target 0.1 --norm-style gn --class-balance --only-hard-label 80 --max-value 7 --gpu-ids 0,1,2 --often-balance --use-se --swa --swa_start 30000 --adaboost --sam產生偽標籤:
python generate_plabel_robot.py --restore ./snapshots/Adaboost_SWA3W_Robot_SE_GN_batchsize6_adapative_kl0.1_sam_lr6/GTA5_70000_average.pth第二階段:(約75.62%)
python train_ft_robot.py --snapshot-dir ./snapshots/Adaboost_0.9RB_b3_lr3_800x432_97_swa0W_T80 --restore-from ./snapshots/Adaboost_SWA3W_Robot_SE_GN_batchsize6_adapative_kl0.1_sam_lr6/GTA5_70000_average.pth --drop 0.1 --warm-up 5000 --batch-size 3 --learning-rate 3e-4 --crop-size 800,432 --lambda-seg 0.5 --lambda-adv-target1 0 --lambda-adv-target2 0 --lambda-me-target 0 --lambda-kl-target 0 --norm-style gn --class-balance --only-hard-label 50 --max-value 7 --gpu-ids 0,1,2 --often-balance --use-se --input-size 1280,960 --train_bn --adaboost --swa --swa_start 0 --threshold 0.8 --autoaug False第一階段:(約39.5%)
python train_ms.py --snapshot-dir ./snapshots/255VGGBN_Adaboost_SWA_SE_GN_batchsize3_1024x512_pp_ms_me0_classbalance7_kl0.1_lr3_drop0.1_seg0.5_swa0_auto --drop 0.1 --warm-up 5000 --batch-size 3 --learning-rate 3e-4 --crop-size 1024,512 --lambda-seg 0.5 --lambda-adv-target1 0.0002 --lambda-adv-target2 0.001 --lambda-me-target 0 --lambda-kl-target 0.1 --norm-style gn --class-balance --only-hard-label 80 --max-value 7 --gpu-ids 0,1,2 --often-balance --use-se --swa --swa_start 0 --adaboost --model DeepVGG --autoaug python evaluate_cityscapes.py --restore-from ./snapshots/ReRUN_Adaboost_SWA_SE_GN_batchsize2_1024x512_pp_ms_me0_classbalance7_kl0.1_lr2_drop0.1_seg0.5_swa0/GTA5_40000_average.pth訓練好的模型可以在[等待]中找到
SY的資料夾用於 SYNTHIA-to-CityscapesRB的資料夾用於 Cityscapes-to-Robot Car核心程式碼比較簡單,可以直接應用在其他作品中。
自適應資料取樣器:https://github.com/layumi/AdaBoost_Seg/blob/master/train_ms.py#L429-L436
學生聚合:https://github.com/layumi/AdaBoost_Seg/blob/master/train_ms.py#L415-L427
我們也要感謝以下優秀作品:
@article { zheng2021adaboost ,
title = { Adaptive Boosting for Domain Adaptation: Towards Robust Predictions in Scene Segmentation } ,
author = { Zheng, Zhedong and Yang, Yi } ,
journal = { IEEE Transactions on Image Processing } ,
doi = { 10.1109/TIP.2022.3195642 } ,
note = { mbox{doi}:url{10.1109/TIP.2022.3195642} } ,
year = { 2021 }
}

