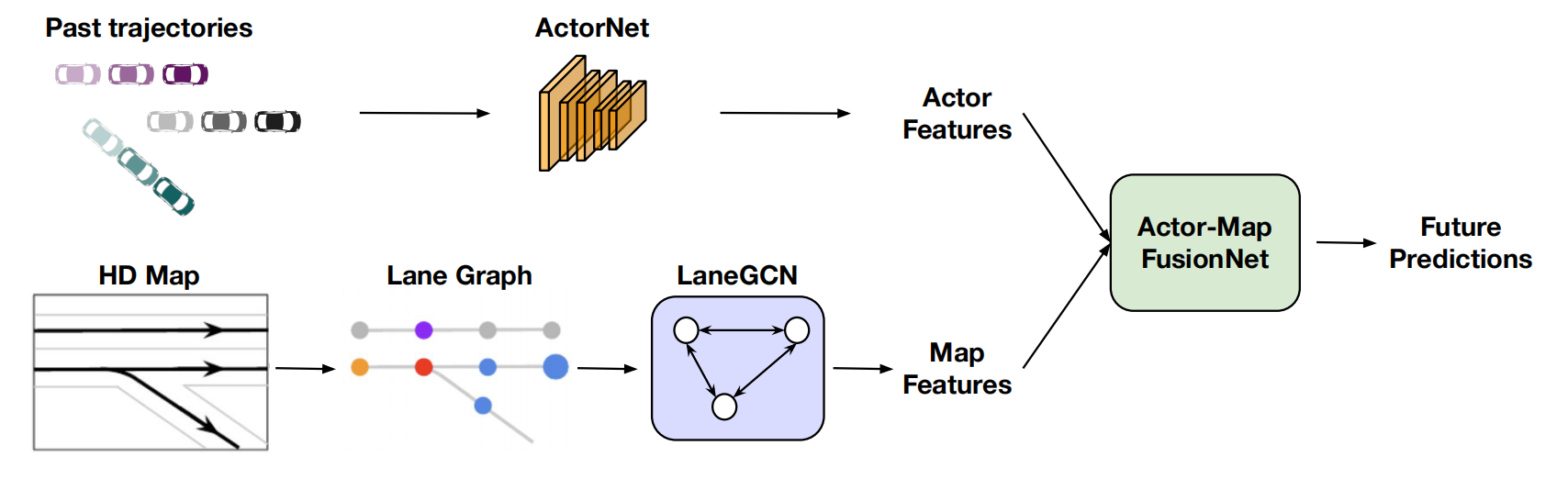
LaneGCN
1.0.0
警告
保存許多演示檔案的 Amazon AWS S3 儲存桶argoai-argoverse已洩露。文件可能已損壞。
引用此 S3 儲存桶的檔案已被修改,並且從此儲存桶中進行的任何檢索都已註解掉。請謹慎行事。
紙|幻燈片|項目頁面| ECCV 2020 口頭視頻
梁明、楊斌、胡銳、陳韻、廖仁傑、宋峰、Raquel Urtasun
Argoverse運動預測競賽第一名
您需要安裝以下軟體包才能運行程式碼:
conda create --name lanegcn python=3.7
conda activate lanegcn
conda install pytorch==1.5.1 torchvision cudatoolkit=10.2 -c pytorch # pytorch=1.5.1 when the code is release
# install argoverse api
pip install git+https://github.com/argoai/argoverse-api.git
# install others dependancy
pip install scikit-image IPython tqdm ipdbmpi4py進行分散式訓練。對於多 GPU 訓練,Horovod 比nn.DataParallel更有效率,並且比nn.DistributedDataParallel更容易使用。在安裝 horovod 之前,請確保已安裝 openmpi ( sudo apt-get install -y openmpi-bin )。 pip install mpi4py
# install horovod with GPU support, this may take a while
HOROVOD_GPU_OPERATIONS=NCCL pip install horovod==0.19.4
# if you have only SINGLE GPU, install for code-compatibility
pip install horovod如果您有任何關於horovod的問題,請參考horovod github
您可以檢查腳本並下載處理後的數據,而不是運行幾個小時。
bash get_data.sh # single node with 4 gpus
horovodrun -np 4 -H localhost:4 python /path/to/train.py -m lanegcn
# 2 nodes, each with 4 gpus
horovodrun -np 8 -H serverA:4,serverB:4 python /path/to/train.py -m lanegcn使用 horovod 在 4 個 GPU (RTX 5000) 上訓練模型需要 8 小時。
我們也提供訓練日誌供您調試。
python train.py -m lanegcn您可以從這裡下載預訓練模型
python test.py -m lanegcn --weight=/absolute/path/to/36.000.ckpt --split=test
python test.py -m lanegcn --weight=36.000.ckpt --split=val
定性結果
標籤(紅色) 預測(綠色) 其他代理(藍色)
定量結果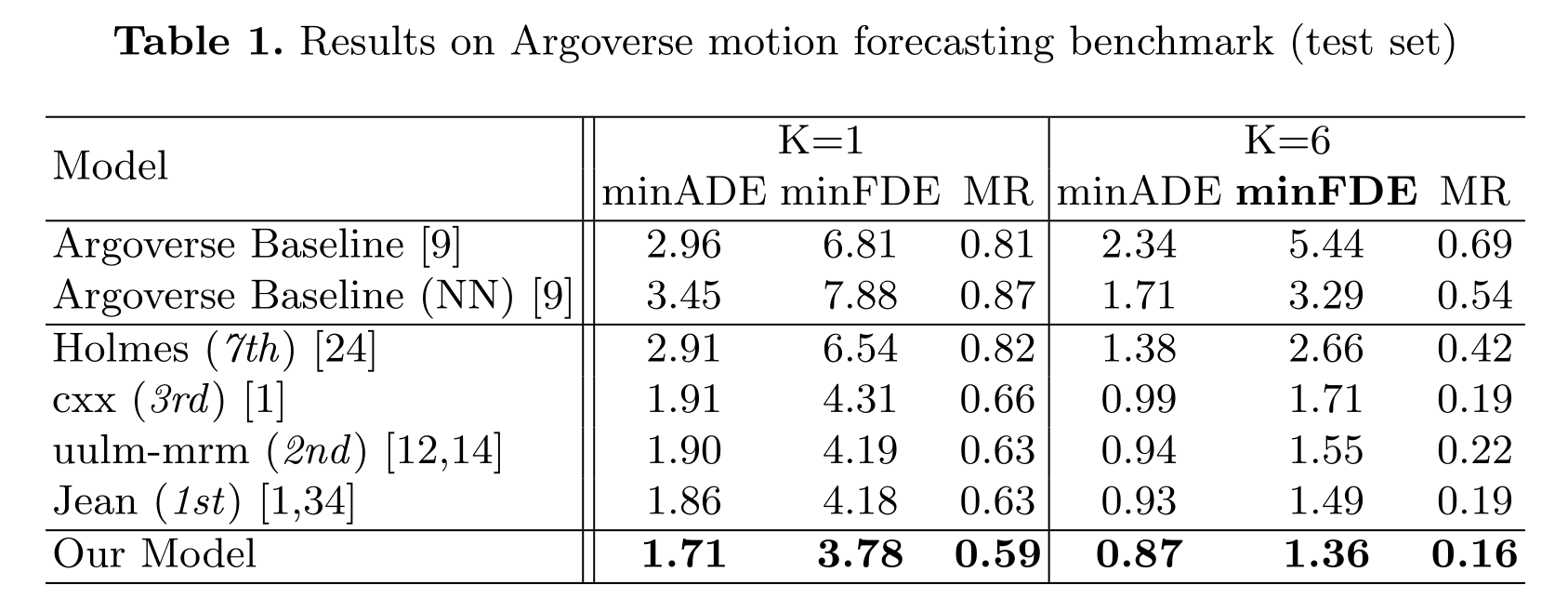
檢查許可證
如果您使用我們的原始程式碼,請考慮引用以下內容:
@InProceedings { liang2020learning ,
title = { Learning lane graph representations for motion forecasting } ,
author = { Liang, Ming and Yang, Bin and Hu, Rui and Chen, Yun and Liao, Renjie and Feng, Song and Urtasun, Raquel } ,
booktitle = { ECCV } ,
year = { 2020 }
}如果您對程式碼有任何疑問,請打開問題並@chenyuntc。


