Event Beacon Communication
1.0.0
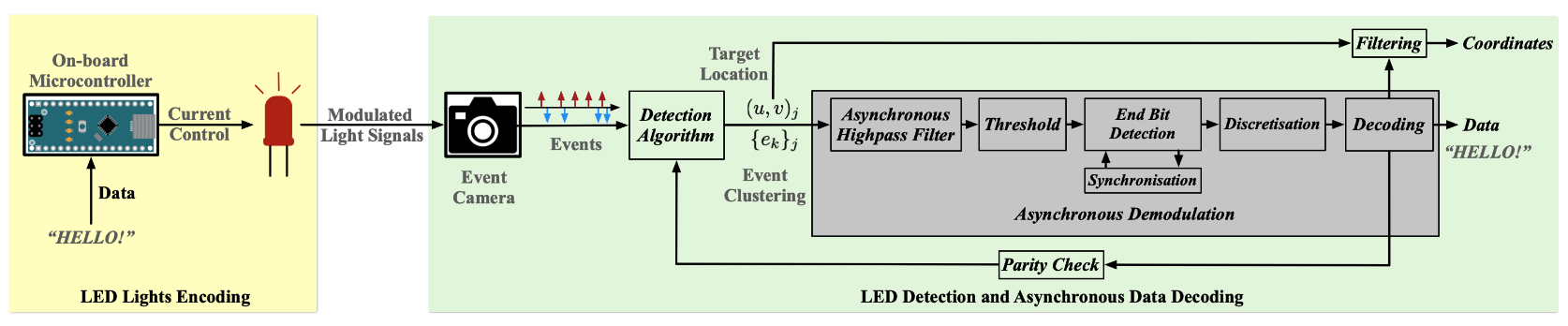
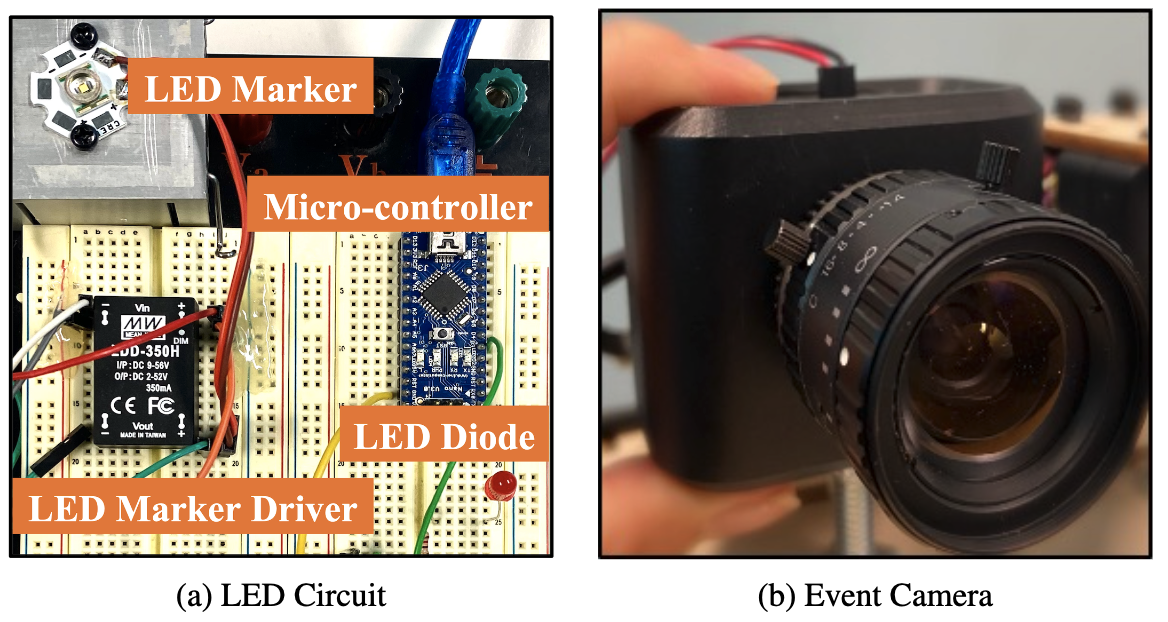
事件攝像機是由生物啟發的動態視覺傳感器,它們以高時間分辨率,高動態範圍和低延遲響應圖像強度的變化。這些傳感器特性非常適合與智能視覺信標的廣播視覺通信通道一起啟用視覺目標跟踪,並在分佈式機器人中應用。視覺信標可以通過光發射二極管(LED)的高頻調製(例如車輛前大燈,物聯網(IoT)LED,智能建築燈等)來構建,這些燈光(IoT),智能建築燈等在許多真實世界中都已經存在。事件攝像機的高時間分辨率特徵使他們能夠以基於經典的框架相比,以更高的數據速率捕獲視覺信號。在本文中,我們提出了一種具有LED調製和事件攝像頭解調算法的新型智能視覺信標體系結構。我們定量評估了我們原型的智能視覺信標通信系統的LED傳輸速率,通信距離和消息傳輸精度之間的關係。所提出的方法在室內環境中最多可實現4 kbps,並且在100米的距離內,以500 bps的距離達到了無損的傳播,在陽光充足的情況下,表明了該技術在室外環境中的潛力。
Ziwei Wang,Yonhon NG,Jack Henderson和Robert Mahony
該論文被日本京都的IEEE國際智能機器人與系統國際會議(IROS 2022)接受。
[會議論文] [Arxiv預印本]
如果您使用或討論我們的算法或數據集,請引用我們的論文如下:
@inproceedings {wang22iros,
作者= {Ziwei Wang和Yonhon Ng和Jack Henderson和Robert Mahony},
title = {使用事件攝像機的異步光學通信的智能視覺信標},
BookTitle = {“國際智能機器人和系統會議(IROS 2022)”},
年= {2022}
}
運行decoder.m ,它將從./data加載事件數據。解碼代碼decoder.m輸出解碼的消息和準確率(消息準確率和位準確率)。
如果您有任何疑問或建議,請隨時與[email protected]聯繫


