ROScribe
v0.0.4
使用LLMS創建ROS軟件包。
Roscribe使用自然語言界面來描述機器人項目,消除了將ROS用於初學者的技能障礙,並為熟練的工程師節省了時間和麻煩。 Roscribe結合了大語言模型(LLM)的純粹功能和靈活性以及及時的調整技術,以捕獲機器人設計的詳細信息,並自動為您的項目創建整個ROS包裝。
Roscribe通過代理多步進方法構建了整個ROS工作區,每個步驟都集中在機器人軟件設計的一個特定方面。特別是,Roscribe可以幫助您完成以下步驟:
如果您是ROS的新手,Roscribe將是您的機器人(ICS)導師?
如果您是經驗豐富的ROS用戶,Roscribe可以幫助您為您的ROS包裝創建藍圖嗎?測
Roscribe由4個代理組成。下面的列表詳細介紹了每個代理的責任,如互動順序所示:
SpecAgent :幫助您項目的整體骨架。用ROS術語,它構建了您的項目的ROS圖,在該圖中,圖形的每個部分都可以從開源式重新安裝中進行AI生成或拉出。GenAgent :鑑於ROS圖,該代理生成了Python中每個ROS節點的ROS工作區和代碼。另外,它可以下載ROS節點的開源實現。PackAgent :在了解生成的ROS工作區的知識中,該代理會創建一個ROS啟動文件,從而帶有ROS節點。此外,該代理人生成了package.xml , CMakeLists.txt和README.md文件。SupportAgent :這是您的客戶支持代理,在運行項目期間遇到錯誤時,可以為您提供幫助。代理已經可以訪問項目的佈局,並且可以內部讀取生成的文件。下圖說明了Roscribe的體系結構: 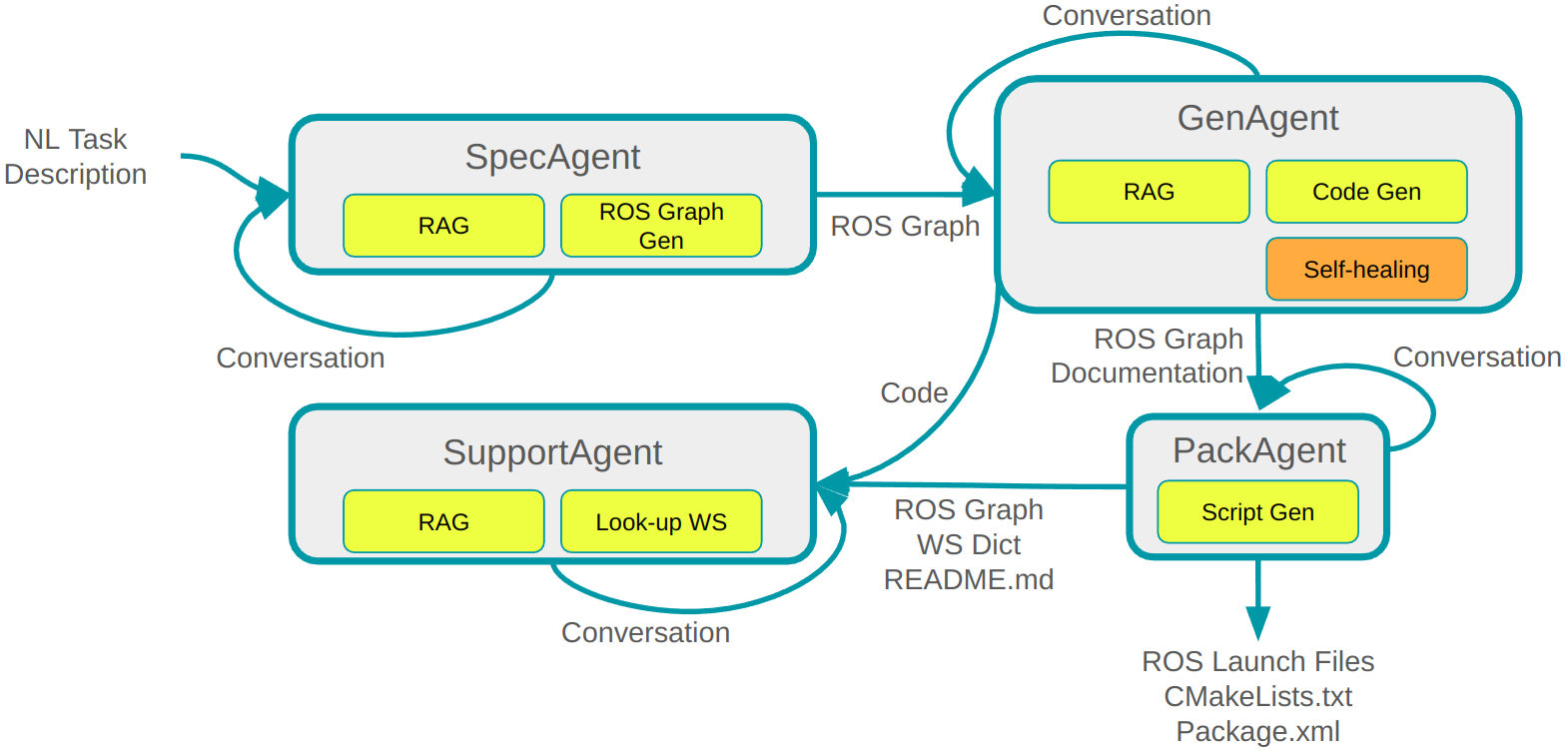
請參閱我們的Wiki頁面,以了解如何在機器人項目中安裝和使用Roscribe:
查看Roscribe和基於LLM的機器人平台的想法
UCSD ROS研討會的演示幻燈片2023年10月27日
UCSD ROS研討會演示的視頻錄製2023年10月27日
有關業務查詢,例如諮詢或承包工作,請聯繫[email protected]。
作為一個開源項目,我們鼓勵所有機器人發燒友為Roscribe做出貢獻。在每個版本中,我們將宣布新貢獻者的名單。


