open3d_slam
1.0.0
open3d_slam هي مكتبة C++ (cpp) لـ SLAM مع تكامل ROS.
جهة الاتصال الرئيسية: إيدو يلافيتش ([email protected])
المؤلفون: إيدو يلافيتش، جوليان نوبرت، ماركو هوتر
الملصق والملخص: الرابط
التوثيق: الرابط
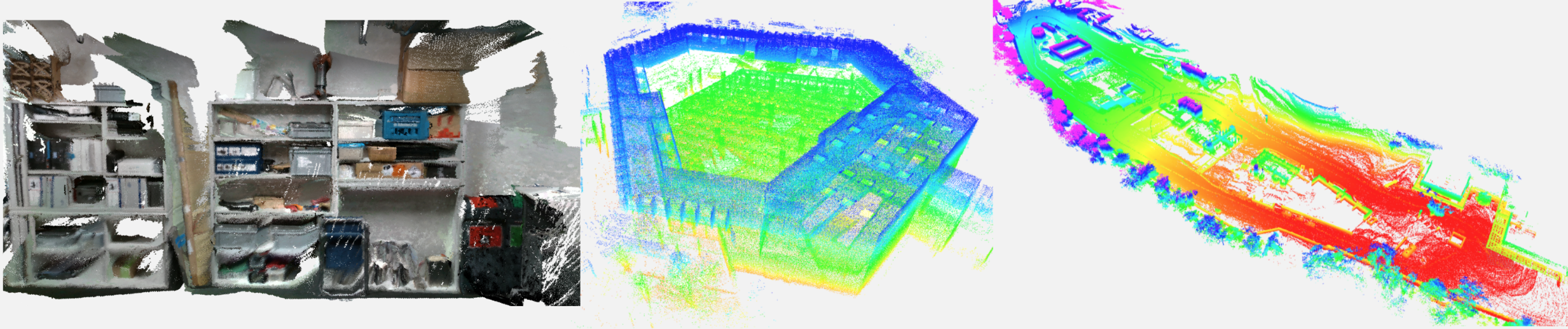
يتمثل الاختلاف الرئيسي بين open3d_slam ومكتبات SLAM الأخرى في أن open3d_slam تم تصميمه ليكون بسيطًا ويستخدم لأغراض تعليمية. في الواقع، يستخدم open3d_slam فقط الخوارزميات الراسخة في شكلها الأساسي. نأمل أن يسهل هذا على الوافدين الجدد دخول هذا المجال. إنه يعمل مع Pointclouds، ولا يلزم إدخال أي مدخلات إضافية مثل IMU. يمكن لـ Open3D_slam إنشاء خريطة من البداية أو تحديد موقعها في خريطة معينة. يمكن أيضًا توسيع الخريطة المحددة بقياسات جديدة.
نحن نبني تنفيذنا على Open3D، وهي مكتبة جيدة الصيانة وعالية الأداء لمعالجة البيانات ثلاثية الأبعاد.
يمكن العثور على الوثائق ومجموعات البيانات النموذجية هنا open3d_slam Documentation.
نحن نقدم غلافًا صغيرًا لـ Open3D بحيث يمكنك بسهولة استخدام Open3D في مشاريع ROS الخاصة بك. راجع الوثائق في open3d_catkin/README.md.
إذا وجدت هذا العمل مفيدًا، أو استخدمته في بحثك، فيرجى التفكير في الاستشهاد بالعمل المقابل:
@inproceedings{jelavic2022open3d,
title={Open3D SLAM: Point Cloud Based Mapping and Localization for Education},
author={Jelavic, Edo and Nubert, Julian and Hutter, Marco},
booktitle={Robotic Perception and Mapping: Emerging Techniques, ICRA 2022 Workshop},
pages={24},
year={2022},
organization={ETH Zurich, Robotic Systems Lab}
}


