يستخرج هذا الرمز دوران العالم في مانهاتن المحلي من الصور العمق في الوقت الفعلي. فيما يلي مقطع فيديو تجريبي لثلاثة تسلسلات RGB-D مختلفة: 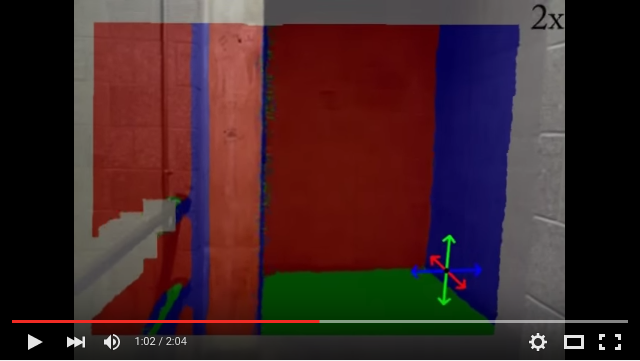
إذا كنت تستخدم هذا الرمز لبحثك ، فيرجى الاستشهاد
Real-time Manhattan World Rotation Estimation in 3D (Julian Straub,
Nishchal Bhandari, John J. Leonard, John W. Fisher III), In IROS, 2015.
يعتمد هذا الرمز على المكتبات الأخرى التالية وتم اختباره بموجب Ubuntu 14.04.
تم اختبار نواة GPU على Nvidia Quadro K2000M مع قدرة حساب 3.0.
بمجرد أن يكون لديك هذه التبعيات في مكانها
make checkout && make configure && make
سيؤدي ذلك إلى الخروج من التبعيات من بعض مستودعاتي الأخرى (JSCORE ، MMF ، CUDEPCL) وتجميع كل شيء إلى ./build/
بعد تثبيت المكتبة ، حاول تشغيل ما يلي لاستنتاج MF لمشهد بسيط بعد افتراض عالم مانهاتن:
./pod-build/bin/realtimeMF -i data/MIT_hallway_1_d.png -o MIT_hallway_1 -d
سيكون هناك ملف .csv نتائج مع دوران MF وصورة تتراكب التجزئة أعلى الصورة على نطاق رمادي للمشهد.
يجمع libcudapcl.so جميع كود CUDA في مكتبة مشتركة واحدة. بقية الكود في شكل ملفات رأس.
Allowed options:
-h [ --help ] produce help message
-m [ --mode ] arg mode of the rtmf (direct, approx, vmf)
-i [ --in ] arg path to input file
-o [ --out ] arg path to output file
-d [ --display ] display results
-B [ --B ] arg B for guided filter
-T [ --T ] arg number of iterations
--eps arg eps for guided filter
-f [ --f_d ] arg focal length of depth camera
--nCGIter arg max number of CG iterations
--dt arg steplength for linesearch
--tMax arg max length for linesearch
Allowed options:
-h [ --help ] produce help message
-m [ --mode ] arg mode of the rtmf (direct, approx, vmf)
-o [ --out ] arg path to output file
-d [ --display ] display results
-B [ --B ] arg B for guided filter
-T [ --T ] arg number of iterations
--eps arg eps for guided filter
-f [ --f_d ] arg focal length of depth camera
--nCGIter arg max number of CG iterations
--dt arg steplength for linesearch
--tMax arg max length for linesearch


