ROScribe
v0.0.4
إنشاء حزم ROS باستخدام LLMS.
باستخدام واجهة لغة طبيعية لوصف المشاريع الآلية ، يلغي Rescribe حاجز المهارة في استخدام ROS للمبتدئين ، ويوفر الوقت والمشاحنات للمهندسين المهرة. يجمع Rescribe بين القوة المطلقة والمرونة في نماذج اللغة الكبيرة (LLMS) مع تقنيات ضبط سريعة لالتقاط تفاصيل التصميم الآلي الخاص بك وإنشاء حزمة ROS بالكامل لمشروعك تلقائيًا.
تقوم Rescribe بإنشاء مساحة عمل ROS بأكملها عبر نهج متعدد الخطوات ، حيث تركز كل خطوة على جانب واحد محدد من تصميم برامج الروبوت. على وجه الخصوص ، تساعدك Rescribe في الخطوات التالية:
إذا كنت جديدًا على ROS ، فستكون Rescribe معلم روبوت (ICS)؟ ️
إذا كنت من مستخدمي ROS محنك ، فيمكن أن يساعد Rescribe في إنشاء مخطط لحزمة ROS الخاصة بك؟ ️
تتكون ROSCION من 4 وكلاء. تفاصيل القائمة أدناه مسؤوليات كل وكيل ، الموضحة بترتيب التفاعل:
SpecAgent : يساعد في الهيكل العظمي العام لمشروعك. بعبارات ROS ، تقوم بإنشاء رسم بياني ROS لمشروعك ، حيث يمكن أن يتم توليد كل جزء من الرسم البياني أو سحبه من AI من إعادة إنشاء المصدر المفتوح.GenAgent : بالنظر إلى الرسم البياني ROS ، يقوم هذا الوكيل بإنشاء مساحة عمل ROS والرمز لكل عقدة ROS في Python. بدلاً من ذلك ، يمكنه تنزيل تطبيق مفتوح المصدر لعقدة ROS.PackAgent : مع معرفة مساحة عمل ROS التي تم إنشاؤها ، يقوم هذا الوكيل بإنشاء ملف إطلاق ROS الذي يعرض عقد ROS. علاوة على ذلك ، يتم إنشاء ملفات package.xml و CMakeLists.txt و README.md بواسطة هذا الوكيل.SupportAgent : هذا هو وكيل دعم العملاء الخاص بك ، والذي يمكن أن يساعدك كلما واجهت خطأ أثناء تشغيل مشروعك. يتمتع الوكيل بالفعل بالوصول إلى تخطيط المشروع ، ويمكنه قراءة الملفات التي تم إنشاؤها داخليًا. يوضح الشكل التالي بنية Rescribe: 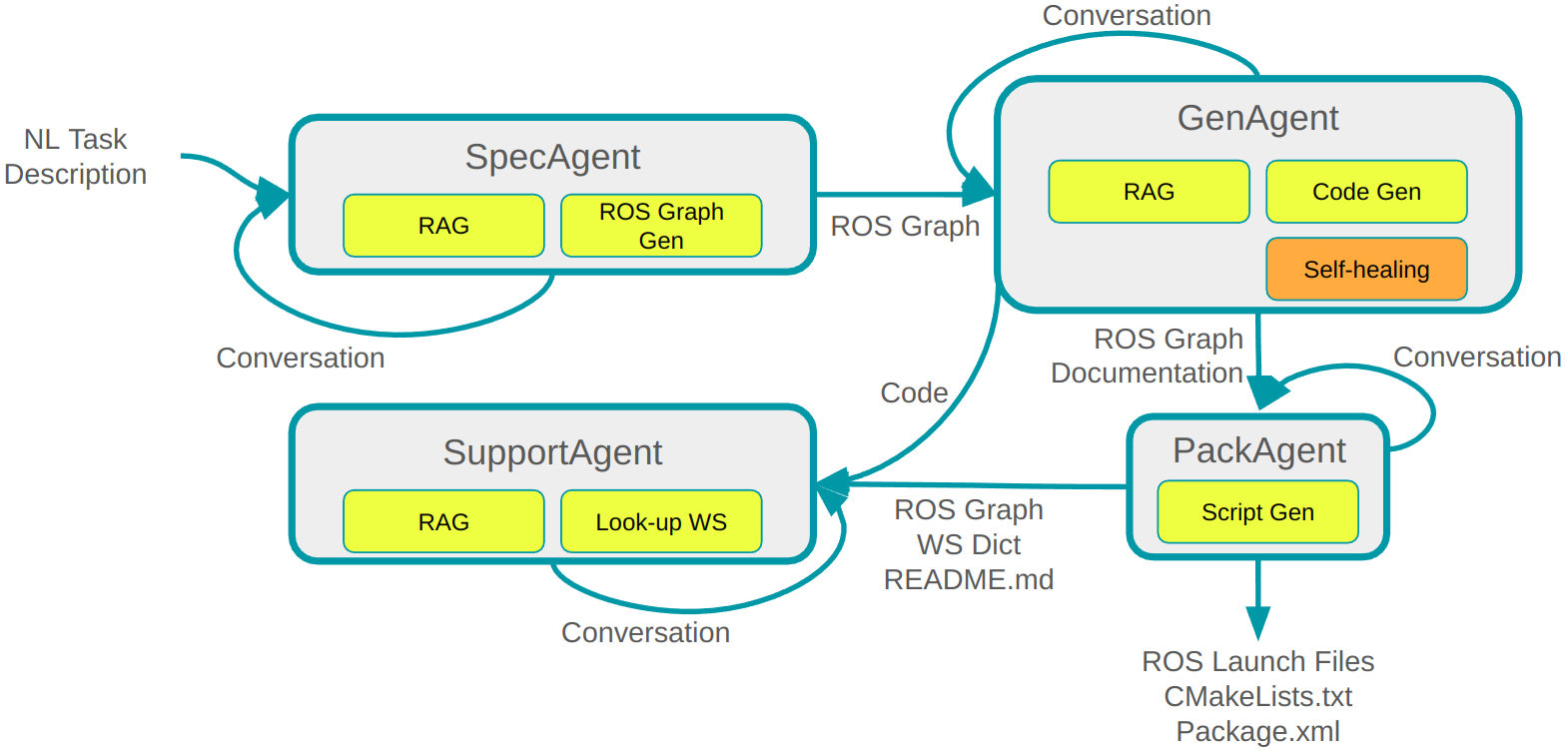
يرجى الاطلاع على صفحة Wiki الخاصة بنا لمعرفة كيفية تثبيت واستخدام Rescribe في مشاريع الروبوتات الخاصة بك:
البحث عن الداخل وفكرة منصة روبوتية قائمة على LLM
شرائح العرض التقديمي لورشة UCSD ROS 27 أكتوبر 2023
تسجيل الفيديو لعرض ورشة عمل UCSD ROS 27 أكتوبر 2023
للاستفسارات التجارية ، مثل الاستشارات أو الوظائف المتعاقدة ، يرجى الاتصال بـ [email protected].
كمشروع مفتوح المصدر ، نشجع جميع عشاق الروبوتات على المساهمة في المساهمة. خلال كل إصدار ، سنعلن عن قائمة المساهمين الجدد.


