arduino pico
Release 4.2.1 - New boards, MDNS, and bug fixes
Inti Raspberry Pi Pico Arduino, untuk semua papan RP2040 dan RP2350
Ini adalah port Arduino ke RP2040 (prosesor Raspberry Pi Pico) dan RP2350 (prosesor Raspberry Pi Pico 2). Ia menggunakan Raspberry Pi Pico SDK dan toolchain GCC 14.2/Newlib 4.3 khusus dan mendukung inti ARM dan RISC-V.
Lihat https://arduino-pico.readthedocs.io/en/latest/ beserta contoh untuk informasi penggunaan lebih detail.
Baca Panduan Berkontribusi untuk informasi lebih lanjut tentang mengirimkan permintaan penarikan dan memindahkan perpustakaan atau sketsa ke inti ini.
Mesin status (SM) PIO RP2040 digunakan untuk menghasilkan bebas jitter:
Harap jangan menggunakan versi Windows Store dari aplikasi Arduino yang sebenarnya karena ada masalah dalam mendeteksi papan Pico yang terpasang. Gunakan unduhan "Windows ZIP" atau "Windows" biasa yang dapat dieksekusi (EXE) langsung dari https://arduino.cc. dan izinkan untuk menginstal driver perangkat apa pun yang disarankan. Jika tidak, papan Pico mungkin tidak terdeteksi. Selain itu, jika mencoba Arduino 2.0 beta, harap instal versi rilis 1.8 terlebih dahulu untuk memastikan driver perangkat yang diperlukan tersedia. (Lihat #20 untuk lebih jelasnya.)
Menginstal Arduino menggunakan flatpak (sering digunakan oleh "App Store" di berbagai distribusi Linux) berarti Arduino membatasi akses ke host. Hal ini mungkin menyebabkan unggahan gagal dengan pesan kesalahan seperti berikut:
Scanning for RP2040 devices
...
No drive to deploy.
Jika Anda mengalami hal ini, Anda perlu menginstal Arduino dengan cara yang berbeda, atau mengganti fitur sandbox flatpak menggunakan perintah berikut, lalu memulai ulang Arduino.
flatpak override --user --filesystem=host:ro cc.arduino.IDE2
Buka Arduino IDE dan buka File->Preferences.
Pada dialog yang muncul, masukkan URL berikut di bidang "URL Manajer Papan Tambahan":
https://github.com/earlephilhower/arduino-pico/releases/download/global/package_rp2040_index.json
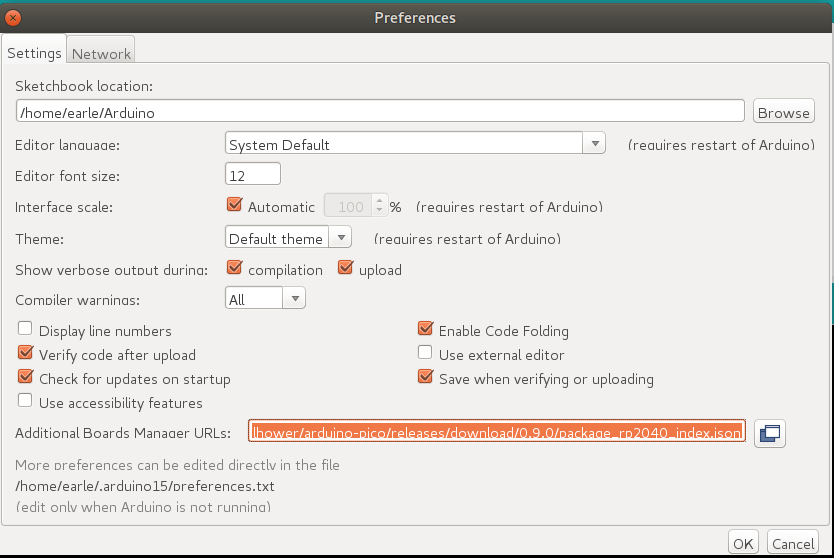
Tekan OK untuk menutup dialog.
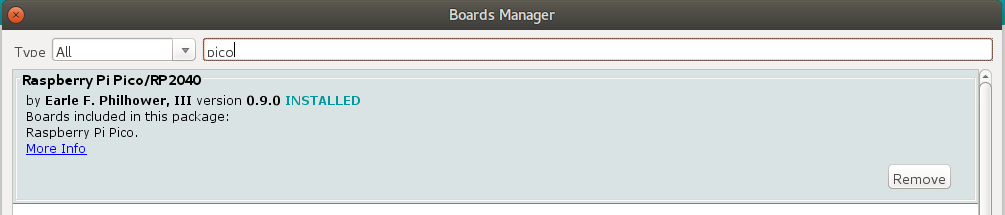
Buka Alat->Papan->Manajer Papan di IDE
Ketik "pico" di kotak pencarian dan pilih "Tambahkan":
Pengguna Windows: Sebelum menginstal melalui git di Windows, harap baca dan ikuti petunjuk di tautan ini. Jika jalur panjang Win32 tidak diaktifkan, dan git tidak dikonfigurasi untuk menggunakannya maka mungkin ada kesalahan saat mencoba mengkloning submodul.
Untuk menginstal melalui GIT (untuk versi terbaru dan terhebat):
mkdir -p ~/Arduino/hardware/pico
git clone https://github.com/earlephilhower/arduino-pico.git ~/Arduino/hardware/pico/rp2040
cd ~/Arduino/hardware/pico/rp2040
git submodule update --init
cd pico-sdk
git submodule update --init
cd ../tools
python3 ./get.py
Untuk mengunggah sketsa pertama Anda, Anda perlu menahan tombol BOOTSEL sambil mencolokkan Pico ke komputer Anda. Kemudian tekan tombol unggah dan sketsa harus ditransfer dan mulai dijalankan.
Setelah pengunggahan pertama, hal ini tidak perlu dilakukan karena inti arduino-pico memiliki dukungan pengaturan ulang otomatis. Pilih port serial yang sesuai yang ditampilkan di menu Arduino Tools->Port->Serial Port satu kali (pengaturan ini akan melekat dan tidak perlu disentuh untuk beberapa kali upload). Pilihan ini memungkinkan alat reset otomatis mengidentifikasi perangkat yang tepat untuk direset. Mereka menekan tombol unggah dan sketsa Anda akan diunggah dan dijalankan.
Dalam beberapa kasus, Pico akan mengalami hard hang dan port USB-nya tidak merespons permintaan reset otomatis. Jika ini terjadi, ikuti saja prosedur awal dengan menahan tombol BOOTSEL sambil mencolokkan Pico untuk masuk ke bootloader ROM.
Sistem file flash onboard untuk Pico, LittleFS, memungkinkan Anda mengunggah gambar sistem file dari direktori sketsa untuk digunakan sketsa Anda. Unduh plugin yang diperlukan dari
Untuk menginstal, ikuti petunjuk di
Untuk informasi penggunaan terperinci, silakan periksa dokumentasi repo ESP8266 (abaikan catatan terkait SPIFFS) yang tersedia di
Jika Anda telah membuat Raspberry Pi Picoprobe, Anda dapat menggunakan OpenOCD untuk menangani unggahan sketsa Anda dan untuk melakukan debug dengan GDB.
Di Windows, pengguna admin lokal harus dapat mengakses port Picoprobe secara otomatis, tetapi di Linux udev harus diberi tahu tentang perangkat tersebut dan mengizinkan akses pengguna normal.
Untuk mengatur akses tingkat pengguna ke Picoprobes di Ubuntu (dan OS lain yang menggunakan udev ):
echo 'SUBSYSTEM=="usb", ATTRS{idVendor}=="2e8a", ATTRS{idProduct}=="0004", MODE="660", GROUP-"plugdev"' | sudo tee -a /etc/udev/rules.d/98-PicoProbe.rules
echo 'SUBSYSTEM=="usb", ATTRS{idVendor}=="2e8a", ATTRS{idProduct}=="000a", MODE="660", GROUP="plugdev"' | sudo tee -a /etc/udev/rules.d/98-PicoProbe.rules
echo 'SUBSYSTEM=="usb", ATTRS{idVendor}=="2e8a", ATTRS{idProduct}=="000f", MODE="660", GROUP="plugdev"' | sudo tee -a /etc/udev/rules.d/98-PicoProbe.rules
sudo udevadm control --reload
sudo udevadm trigger -w -s usb
Baris pertama membuat file perangkat di /dev yang cocok dengan vendor USB dan ID produk Picoprobe, dan mengaktifkan izin baca+tulis global. Baris kedua menyebabkan udev memuat aturan baru ini. Baris ketiga meminta kernel menghasilkan peristiwa "perubahan perangkat" yang akan menyebabkan aturan udev baru kita dijalankan.
Jika karena alasan tertentu file perangkat tidak muncul, cabut secara manual dan sambungkan kembali koneksi USB dan periksa kembali. Output dari dmesg dapat menampilkan diagnostik yang berguna jika file perangkat tetap tidak ada.
Setelah izin Picoprobe diatur dengan benar, lalu pilih papan "Raspberry Pi Pico (Picoprobe)" di menu Alat dan unggah seperti biasa.
Alat yang diinstal mencakup versi OpenOCD (di direktori pqt-openocd) dan GDB (di direktori pqt-gcc). Ini dapat digunakan untuk menjalankan GDB di jendela interaktif seperti yang didokumentasikan dalam manual Memulai Pico dari Raspberry Pi Foundation. Gunakan baris perintah ./system/openocd/bin/openocd -f ./lib/rp2040/picoprobe_cmsis_dap.tcl atau ./system/openocd/bin/openocd -f ./lib/rp2350/picoprobe_cmsis_dap.tcl dari direktori instalasi git .
-Earle F. Philhower, III
[email protected]


