Navigating Ryze Tello Drones With MATLAB App
v1.1.1
Untuk mengontrol Ryze® Tello Drone secara interaktif yang terhubung ke komputer Anda yang menjalankan MATLAB®, MathWorks® menyediakan aplikasi MATLAB - Ryze Tello Navigator. Aplikasi ini membantu Anda untuk:
Lihat semua drone Ryze Tello yang terhubung ke jaringan WiFi komputer.
Melakukan lepas landas/mendarat drone.
Kontrol navigasi drone menggunakan keyboard atau dengan menggunakan tombol kontrol navigasi di aplikasi.
Pratinjau umpan kamera dan ambil gambar.
Rekam umpan video drone ke dalam variabel ruang kerja MATLAB.
Hasilkan skrip MATLAB untuk navigasi yang telah selesai.
Instal Paket Dukungan MATLAB dan MATLAB untuk Ryze Tello Drones
Lakukan Pengaturan dan Konfigurasi awal dan sambungkan ke satu atau lebih Drone Ryze Tello.
Unduh atau klon repositori ini.
Arahkan ke folder repositori lokal di MATLAB
Jalankan perintah berikut di jendela perintah MATLAB:
jalur tambahan(pwd);
jalur penyelamatan;
Luncurkan aplikasi dengan menjalankan perintah ryzeTelloNavigator .
Memerlukan rilis MATLAB R2022a atau lebih baru
Paket Dukungan MATLAB® untuk Drone Ryze Tello®
Pastikan drone yang muncul di Daftar Perangkat adalah drone yang ingin Anda kendalikan menggunakan aplikasi. Jika drone tidak terdaftar, lakukan Pengaturan dan Konfigurasi lagi.
| Melangkah | Tindakan | Hasil |
|---|---|---|
| 1 |  Klik nama drone dari Daftar Perangkat dan klik Pemeriksaan Pra-Penerbangan di bagian Navigasi di atas. Klik nama drone dari Daftar Perangkat dan klik Pemeriksaan Pra-Penerbangan di bagian Navigasi di atas. | Kotak dialog baru, Running Pre-flight Checklist, muncul. Semua kontrol lain di aplikasi dinonaktifkan saat pemeriksaan pra-penerbangan sedang berlangsung. Jika ada kesalahan, kotak dialog menyediakan link ke langkah pemecahan masalah yang diperlukan |
| 2 | Setelah memverifikasi bahwa semua pemeriksaan pra-penerbangan berhasil diselesaikan, klik OK. |  Indikasi Selesainya Pemeriksaan Pra-Penerbangan muncul di sisi kanan aplikasi. Semua kontrol lainnya juga diaktifkan. Indikasi Selesainya Pemeriksaan Pra-Penerbangan muncul di sisi kanan aplikasi. Semua kontrol lainnya juga diaktifkan. |
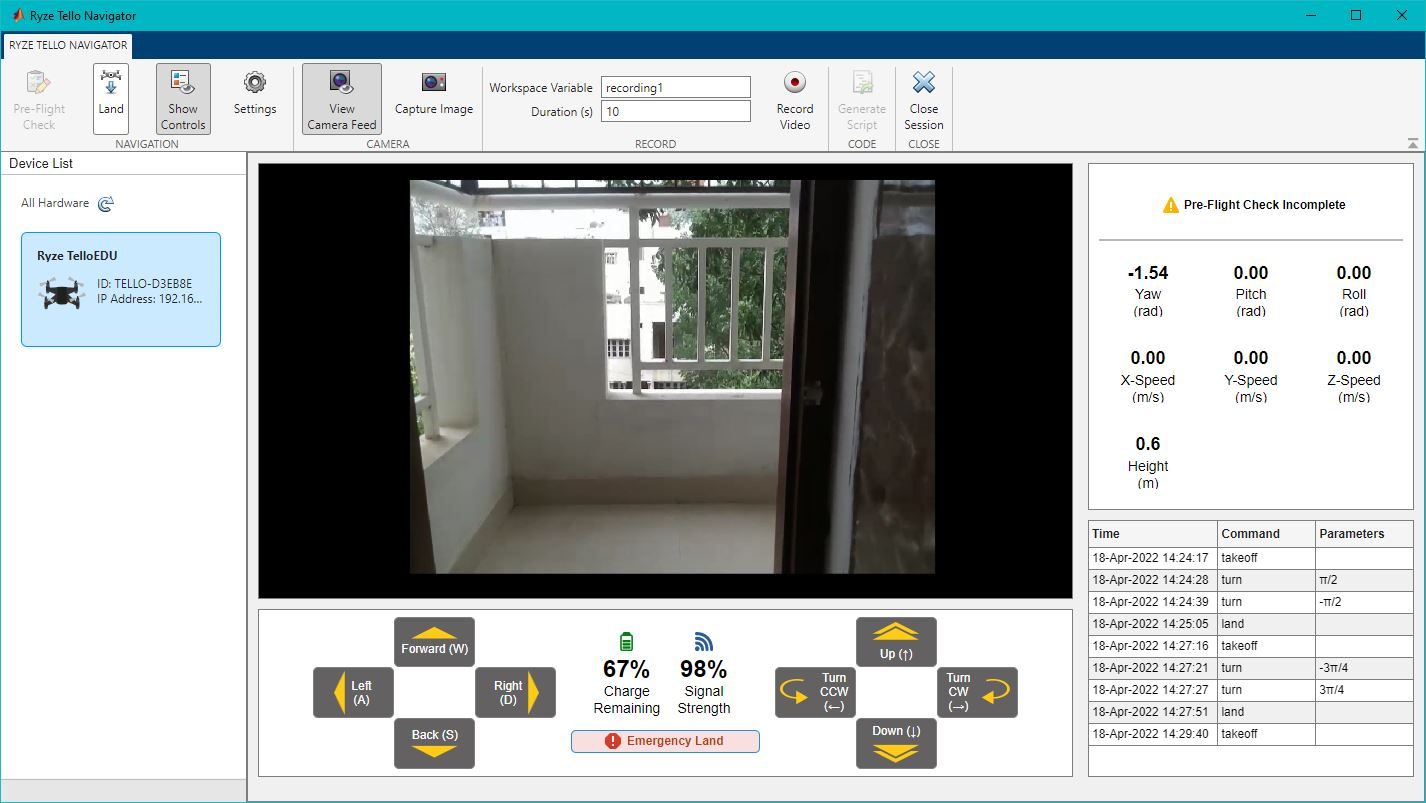
Ryze Tello Navigator membantu Anda melakukan take-off/land dan mengontrol drone Ryze Tello secara interaktif.
Catatan : Sebelum memulai lepas landas drone, pertimbangkan tindakan pencegahan keselamatan umum. Jika Anda merasakan adanya kerusakan yang dapat terjadi pada drone dan sekitarnya saat lepas landas atau saat melakukan kontrol navigasi manual (seperti yang disebutkan pada langkah selanjutnya), Anda dapat mengklik Daratan Darurat . Mengklik tombol ini akan memicu penghentian darurat motor drone yang menyebabkannya jatuh ke tanah dari ketinggian saat ini (untuk drone Tello EDU) atau memaksa drone untuk mendarat secara vertikal dari posisinya saat ini (untuk drone Tello).
| Melangkah | Tindakan | Hasil |
|---|---|---|
| 1 |  Periksa apakah daya baterai dan kekuatan sinyal drone, seperti yang ditampilkan di aplikasi, cukup untuk melakukan lepas landas dan kendali. Periksa apakah daya baterai dan kekuatan sinyal drone, seperti yang ditampilkan di aplikasi, cukup untuk melakukan lepas landas dan kendali. | |
| 2 |  Klik Lihat Umpan Kamera untuk memverifikasi bahwa umpan kamera dari drone berfungsi dengan baik. Klik Lihat Umpan Kamera untuk memverifikasi bahwa umpan kamera dari drone berfungsi dengan baik. | Aplikasi ini menampilkan pratinjau, seperti yang terlihat oleh kamera drone sebelum lepas landas. Nantinya, ketika drone bergerak, previewnya akan diperbarui dengan live feed dari kamera. |
| 3 |  Tekan Spasi pada keyboard Anda atau klik Lepas landas yang muncul di bagian Navigasi di area strip alat. Tekan Spasi pada keyboard Anda atau klik Lepas landas yang muncul di bagian Navigasi di area strip alat. | Motor drone menyala dan drone lepas landas ke ketinggian tertentu dan melayang di posisi tersebut. Tombol Take Off digantikan oleh tombol Land . |
| 4 | Lakukan navigasi manual drone dari aplikasi dengan mengklik masing-masing ikon di aplikasi atau dengan menggunakan keyboard Anda. | Drone bergerak sesuai dengan kontrol navigasi yang Anda aktifkan. Umpan kamera (pratinjau), jika diaktifkan, juga akan diperbarui. Untuk menambah area jendela pratinjau seperti yang terlihat di aplikasi, Anda dapat menyembunyikan panel yang menampilkan tombol untuk kontrol manual. Klik Tampilkan Kontrol untuk menonaktifkan panel. Anda masih dapat menggunakan tombol keyboard untuk mengontrol drone. |
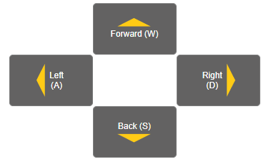
Kunci WASD:
W – Bergerak maju
A – Pindah ke Kiri
S – Bergerak mundur
D – Bergerak ke kanan
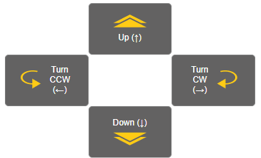
Tombol panah:
▲ – Gerakkan drone ke atas
▼ – Gerakkan drone ke bawah
◄ – Putar drone berlawanan arah jarum jam
► – Putar drone searah jarum jam
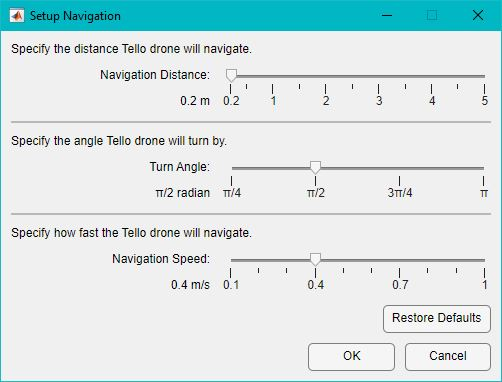
Anda dapat mengubah pengaturan navigasi yang digunakan drone setiap kali Anda memicu pergerakan ke arah tertentu. Klik Pengaturan untuk membuka kotak dialog Pengaturan Navigasi, dan tentukan nilai jarak, sudut, dan kecepatan menggunakan penggeser. Jika Anda ingin mengembalikan nilai default (Jarak Navigasi: 0,2m, Sudut Belok: π/2, Kecepatan navigasi: 0,4m/s), klik Pulihkan Default di kotak dialog.

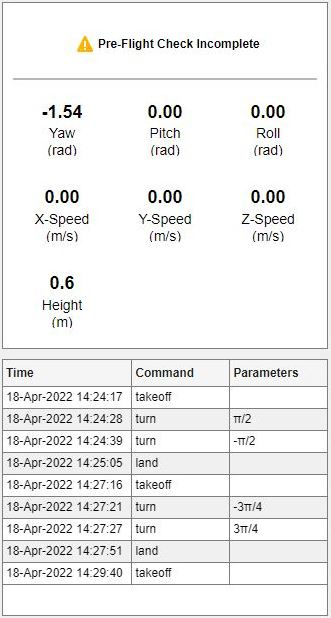
Aplikasi ini juga menampilkan data navigasi langsung (yang ditangkap oleh sensor drone) dan juga log perintah yang Anda picu menggunakan tombol navigasi atau tombol keyboard. Informasi ini muncul di panel sisi kanan.
Ryze Tello Navigator membantu Anda mengambil gambar dan merekam video seperti yang terlihat melalui kamera FPV drone Ryze Tello.
| Melangkah | Tindakan | Hasil |
|---|---|---|
| 1 |  Ambil satu gambar pada satu waktu. Ambil satu gambar pada satu waktu. | Gambar disimpan sebagai variabel ruang kerja. |
| 2 |  Tentukan Variabel Ruang Kerja dan Durasi untuk merekam video, lalu klik Rekam Video. Tentukan Variabel Ruang Kerja dan Durasi untuk merekam video, lalu klik Rekam Video. | Video dari kamera drone mulai direkam selama durasi yang ditentukan. Klik Berhenti untuk menghentikan perekaman kapan saja selama perekaman dan video kemudian secara otomatis disimpan di ruang kerja sebagai susunan gambar. |
Ryze Tello Navigator membantu Anda membuat skrip Editor Langsung dari navigasi yang Anda lakukan. Anda dapat menggunakan skrip ini untuk menentukan pengaturan awal dan jalur penerbangan drone, lalu menambahkan algoritme khusus untuk melakukan alur kerja tambahan.

Caranya, klik Generate Script setelah Anda berhasil mendaratkan drone.
| Peringatan | Masalah dan Tindakan yang Direkomendasikan |
|---|---|
| Tingkat baterai rendah | Aplikasi mulai menampilkan peringatan jika indikasi Charge Remaining menunjukkan nilai di bawah 20% dan drone sedang terbang atau melayang. Jika level baterai turun di bawah 10%, drone akan mendarat secara otomatis dari posisinya saat ini. Untuk menghindari hal ini, pastikan Anda mendaratkan drone menggunakan tombol Land di aplikasi lalu ganti baterai drone. |
| Kekuatan sinyal rendah | Aplikasi ini secara konstan menampilkan nilai Kekuatan Sinyal saat drone terbang. Disarankan agar Anda mengambil tindakan yang diperlukan jika kekuatan sinyal di bawah 20% untuk menghindari kehilangan kendali atas drone. Jika koneksi dengan drone terputus, akan muncul kotak dialog yang menampilkan opsi untuk menyambung kembali dengan drone. Jika masih gagal, pesan kesalahan ditampilkan. |
Lisensi tersedia dalam file LICENSE.TXT di repositori GitHub ini.
Pusat MATLAB
Hak Cipta 2022 The MathWorks, Inc.


