VERI-Wild: Kumpulan Data Besar dan Metode Baru untuk Identifikasi Ulang Kendaraan di Alam Liar

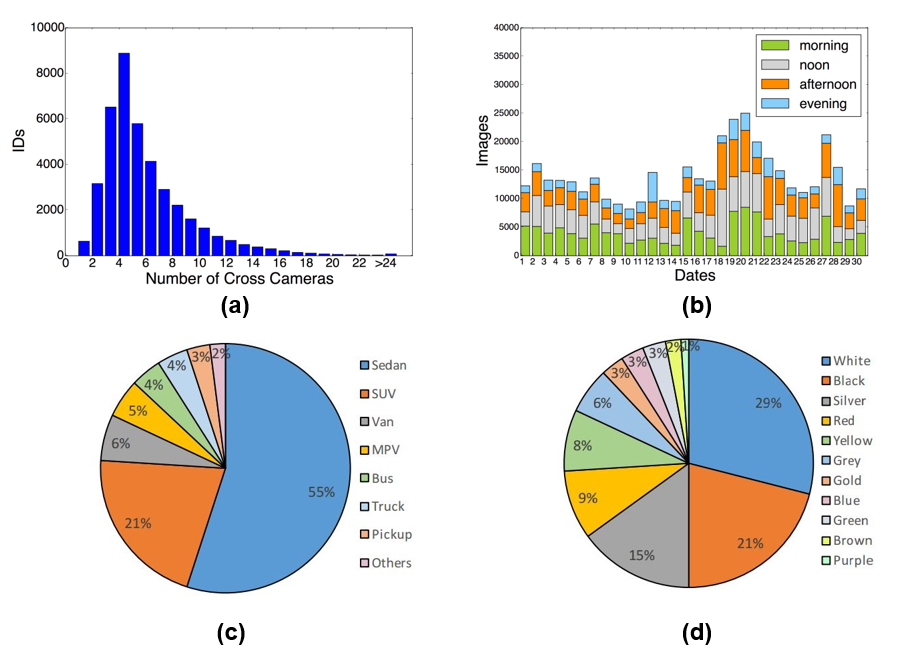
Kumpulan data ReID kendaraan skala besar di alam liar (VERI-Wild) ditangkap dari sistem pengawasan CCTV besar yang terdiri dari 174 kamera dalam satu bulan (30*24 jam) dalam skenario yang tidak dibatasi. Kamera-kamera tersebut didistribusikan di distrik perkotaan besar dengan luas lebih dari 200 km2. YOLO-v2 [2] digunakan untuk mendeteksi kotak pembatas kendaraan. Kumpulan gambar kendaraan mentah berisi 12 juta gambar kendaraan, dan 11 sukarelawan diundang untuk membersihkan kumpulan data selama 1 bulan. Setelah pembersihan data dan anotasi, dikumpulkan 416.314 gambar kendaraan dari 40.671 identitas. Statistik VERI-Wild diilustrasikan pada Gambar. Untuk masalah privasi, pelat nomor disamarkan dalam kumpulan data. Ciri khas VERI-Wild dirangkum dalam beberapa aspek berikut:
Unconstrained capture conditions in the wild Kumpulan data VERI-Wild dikumpulkan dari sistem kamera CCTV nyata yang terdiri dari 174 kamera pengintai, di mana kondisi pengambilan gambar tanpa batasan menimbulkan berbagai tantangan.
Complex capture conditions 174 kamera pengintai tersebar di distrik perkotaan seluas lebih dari 200 km2, menghadirkan berbagai latar belakang, resolusi, sudut pandang, dan oklusi di alam liar. Dalam kasus ekstrim, satu kendaraan muncul di lebih dari 40 kamera berbeda, yang akan menjadi tantangan bagi algoritma ReID.
Large time span involving severe illumination and weather changes VERI-Wild dikumpulkan dari durasi 125, 280 (174x24x30) jam video. Gambar (b) menunjukkan distribusi kendaraan dalam 4 slot waktu 24 jam, yaitu pagi, siang, siang, malam selama 30 hari. VERI-Wild juga berisi kondisi cuaca buruk, seperti hujan, berkabut, dll, yang tidak disediakan di kumpulan data sebelumnya.
Rich Context Information Kami menyediakan informasi konteks yang kaya seperti ID kamera, stempel waktu, hubungan trek di seluruh kamera, yang berpotensi memfasilitasi penelitian tentang analisis perilaku dalam jaringan kamera, seperti pemodelan perilaku kendaraan, pelacakan lintas kamera, dan pengambilan berbasis grafik.
Penting!!!!!!!!!
Perhatikan bahwa, untuk set pengujian VERI-Wild, jika diberi gambar kueri, Anda perlu menghapus gambar dengan id kamera dan id kendaraan yang sama dengan gambar kueri di kumpulan galeri. Mereka tidak dipertimbangkan saat menghitung peta dan CMC.
@inproceedings{lou2019large,
title={VERI-Wild: A Large Dataset and a New Method for Vehicle Re-Identification in the Wild},
author={Lou, Yihang and Bai, Yan and Liu, Jun and Wang, Shiqi and Duan, Ling-Yu},
booktitle={Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition},
pages = {3235--3243},
year={2019}
}@inproceedings{lou2019large,
title={Disentangled Feature Learning Network and a Comprehensive Benchmark for Vehicle Re-Identification},
author={Bai, Yan and Liu, Jun and Lou, Yihang and Wang, Ce and Duan, Ling-Yu},
booktitle={In IEEE Transactions on Pattern Analysis and Machine Intelligence},
year={2021}
}Yan Bai, Email: [email protected]
Untuk mendorong penelitian terkait, kami akan menyediakan dataset sesuai permintaan Anda. Silakan kirimkan nama lengkap dan afiliasi Anda melalui email ke contact person (yanbai di pku dot edu dot cn). Kami meminta informasi Anda hanya untuk memastikan kumpulan data digunakan untuk tujuan non-komersial. Kami tidak akan memberikannya kepada pihak ketiga mana pun atau mempublikasikannya secara publik di mana pun. Karena masalah privasi, kami tidak akan memberikan pelat nomor di masa mendatang. Jika Anda mengunduh dataset kami, berarti Anda telah menyetujui persyaratan akses kami di email.
| Metode | Kecil | Sedang | Besar | ||||||
| peta | Teratas1 | 5 Teratas | peta | Teratas1 | 5 Teratas | peta | Teratas1 | 5 Teratas | |
| GoogleNet[1] | 24.27 | 57.16 | 75.13 | 24.15 | 53.16 | 71.1 | 21.53 | 44.61 | 63,55 |
| FDA-Net (VGGM) [2] | 35.11 | 64.03 | 82,80 | 29.80 | 57.82 | 78.34 | 22.78 | 49.43 | 70.48 |
| MLSL[3] | 46.32 | - | - | 42.37 | - | - | 36.61 | - | - |
| Kembar tiga (Resnet50) | 58.43 | 65.76 | 86,98 | 49.72 | 57.76 | 80,86 | 38.57 | 47.65 | 71.66 |
| FDA-Net (Resnet50) [2] | 61.57 | 73.62 | 91.23 | 52.69 | 64.29 | 85.39 | 45.78 | 58.76 | 80,97 |
| AAVER(Resnet50)[4] | 62.23 | 75,80 | 92,70 | 53.66 | 68.24 | 88,88 | 41.68 | 58.69 | 81.59 |
| DFLNet(Resnet50)[5] | 68.21 | 80,68 | 93.24 | 60.07 | 70,67 | 89.25 | 49.02 | 61.60 | 82.73 |
| BS(jaringan seluler)[6] | 70,54 | 84.17 | 95.30 | 62.83 | 78.22 | 93.06 | 51.63 | 69,99 | 88.45 |
| UMTS(Resnet50)[7] | 72.7 | 84.5 | - | 66.1 | 79.3 | - | 54.2 | 72.8 | - |
| Baesline yang kuat (Resnet50)[8] | 76.61 | 90,83 | 97.29 | 70.11 | 87.45 | 95.24 | 61.3 | 82.58 | 92,73 |
| HPGN(Resnet50+PGN)[9] | 80.42 | 91.37 | - | 75.17 | 88.21 | - | 65.04 | 82.68 | - |
| GLAMOR(Resnet50+PGN)[10] | 77.15 | 92.13 | 97.43 | - | - | - | - | - | - |
| PVEN(Resnet50)[12] | 79.8 | 94.01 | 98.06 | 73.9 | 92.03 | 97.15 | 66.2 | 88.62 | 95.31 |
| HEMAT(Resnet50)[11] | 80.9 | 93,78 | 97,93 | 75.3 | 92.7 | 97.48 | 67.7 | 89,5 | 95.8 |
| DFNet(Resnet50)[14] | 83.09 | 94,79 | 98.05 | 77.27 | 93.22 | 97.46 | 69,85 | 89.38 | 96.03 |
| Metode | Tes Tetapkan Semua | Perangkat Tes A | Set Tes B | ||||||
| peta | Teratas1 | 5 Teratas | peta | Teratas1 | 5 Teratas | peta | Teratas1 | 5 Teratas | |
| Dasar yang Kuat (Resnet50) [8] | 34.71 | 54.37 | 63,99 | 32.75 | 40.12 | 52.18 | 42.25 | 82.72 | 90,67 |
| GSTE (Resnet50) (dengan banyak trik)[13] | 32.57 | 59.25 | 64.48 | 33.01 | 47.54 | 50.81 | 41.82 | 86.08 | 91.43 |
| FDA-Net (Resnet50)(dengan banyak trik) [2] | 34.21 | 57.32 | 64,90 | 34.63 | 45.53 | 52.77 | 3.93 | 84,78 | 92.47 |
| PERNAH (Resnet50) [41] | 36.8 | 59.1 | 67.6 | 36.8 | 48.7 | 57.3 | 45.4 | 86.1 | 94.3 |
| PVEN(Resnet50)[12] | 37.15 | 61.19 | 68.63 | 38.77 | 51.28 | 59.32 | 45.48 | 88.05 | 94.35 |
| HEMAT(Resnet50)[11] | 38.0 | 62.1 | 69.50 | 39.2 | 52.3 | 60.2 | 45.1 | 88.1 | 94.1 |
| DFNet(Resnet50)[14] | 39.84 | 62.21 | 68,90 | 40.39 | 51.68 | 60.51 | 46.13 | 88.56 | 94.17 |
[1] Yang, L., Luo, P., Change Loy, C., Tang, X.: Kumpulan data mobil berskala besar untuk kategorisasi dan verifikasi yang mendetail. Dalam: Konferensi IEEE tentang Visi Komputer dan Pengenalan Pola. (2015)
[2] Lou, Y., Bai, Y., Liu, J., Wang, S., Duan, L.: Veri-wild: Kumpulan data besar dan metode baru untuk identifikasi ulang kendaraan di alam liar. Dalam: Konferensi IEEE tentang ComputerVision dan Pengenalan Pola. (2019)
[3] Alfasly, S., Hu, Y., Li, H., Liang, T., Jin, X., Liu, B., Zhao, Q.: Pembelajaran kesamaan berbasis multi-label untuk identifikasi ulang kendaraan. Akses IEEE7 (2019)
[4] Pirazh, K., Kumar, A., Peri, N., dkk: Model jalur ganda dengan perhatian adaptif untuk identifikasi ulang kendaraan. Dalam: Konferensi Internasional IEEE tentang Visi Komputer (2019)
[5] Yan Bai, Yihang Lou, Yongxing Dai, dkk: Jaringan Pembelajaran Fitur Terurai untuk Identifikasi Ulang Kendaraan. Dalam: IJCAI 2020
[6] Kuma Ratnesh dan Weill Edwin dan dkk: Identifikasi ulang kendaraan: garis dasar yang efisien menggunakan penyematan triplet. DI IJCNN 2019
[7] Xin Jin, Cuiling Lan, Wenjun Zeng, Zhibo Chen: Distilasi Pengetahuan Multi-Shot Sadar Ketidakpastian untuk Identifikasi Ulang Objek Berbasis Gambar. Di: AAAI 2020
[8] Luo Hao dan Gu Youzhi dan dkk: Kumpulan Trik dan Garis Dasar yang Kuat untuk Identifikasi Ulang Orang yang Mendalam. Dalam lokakarya CVPR 2019.
[9] Shen Fei, Zhu Jianqing dan dkk: Menjelajahi Signifikansi Spasial melalui Jaringan Grafik Piramida Hibrid untuk Identifikasi Ulang Kendaraan. Dalam arXiv pracetak arXiv:2005.14684
[10] Abhijit Suprem dan Calton Pu: Tampak GLAMOR: Identifikasi Ulang Kendaraan di Jaringan Kamera Heterogen dengan Perhatian Global dan Lokal. Dalam arXiv pracetak arXiv:2002.02256
[11] Khorramshahi Pirazh, Peri Neehar, Chen Jun-cheng, Chellappa Rama: Iblis ada dalam Detail: Perhatian yang Diawasi Sendiri untuk Identifikasi Ulang Kendaraan. Pada ECCV 2020
[12] Meng, Dechao, dkk. "Jaringan penyematan view-aware berbasis parsing untuk identifikasi ulang kendaraan." Prosiding Konferensi IEEE/CVF tentang Visi Komputer dan Pengenalan Pola. 2020.
[13] Yan Bai, Yihang Lou, Feng Gao, Shiqi Wang, Yuwei Wu, dan Lingyu Duan. Penyematan triplet sensitif grup untuk identifikasi ulang kendaraan. Transaksi IEEE pada Multimedia, 2018.
[14] Yan Bai, Jun Liu, Yihang Lou, Ce Wang, dan Lingyu Duan. Jaringan Pembelajaran Fitur yang Terurai dan Tolok Ukur Komprehensif untuk Identifikasi Ulang Kendaraan. Tpami 2021.


