open3d_slam
1.0.0
open3d_slam adalah perpustakaan C++ (cpp) untuk SLAM dengan integrasi ROS.
Kontak Utama: Edo Jelavic ([email protected])
Penulis: Edo Jelavic, Julian Nubert, Marco Hutter
Poster dan Abstrak: tautan
Dokumentasi: tautan
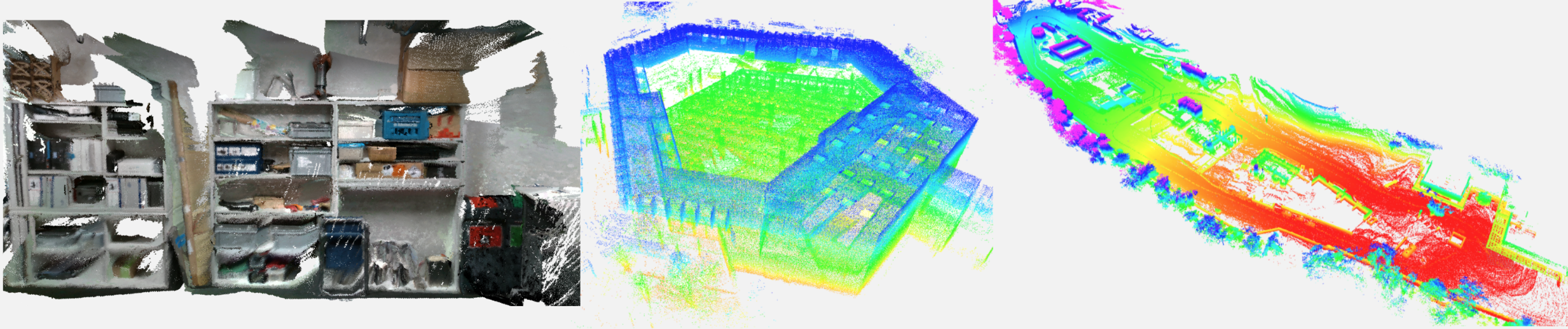
Perbedaan utama antara open3d_slam dan perpustakaan SLAM lain di luar sana adalah open3d_slam dirancang sederhana dan digunakan untuk tujuan pendidikan. Faktanya, open3d_slam hanya menggunakan algoritma yang sudah mapan dalam bentuk dasarnya. Kami berharap hal ini dapat memudahkan pendatang baru untuk terjun ke lapangan. Ia bekerja dengan pointclouds, tidak diperlukan input tambahan seperti IMU. Open3D_slam dapat membuat peta dari awal atau melokalkannya di peta tertentu. Peta yang diberikan juga dapat diperluas dengan pengukuran baru.
Kami mendasarkan implementasi kami pada Open3D, perpustakaan yang terpelihara dengan baik dan berkinerja tinggi untuk pemrosesan data 3D.
Dokumentasi dan contoh kumpulan data dapat ditemukan di sini Dokumentasi open3d_slam.
Kami menyediakan pembungkus catkin untuk Open3D sehingga Anda dapat dengan mudah menggunakan Open3D dalam proyek ROS Anda. Lihat dokumentasi di open3d_catkin/README.md.
Jika Anda merasa karya ini berguna, atau menggunakannya untuk penelitian Anda, mohon pertimbangkan untuk mengutip karya yang sesuai:
@inproceedings{jelavic2022open3d,
title={Open3D SLAM: Point Cloud Based Mapping and Localization for Education},
author={Jelavic, Edo and Nubert, Julian and Hutter, Marco},
booktitle={Robotic Perception and Mapping: Emerging Techniques, ICRA 2022 Workshop},
pages={24},
year={2022},
organization={ETH Zurich, Robotic Systems Lab}
}


