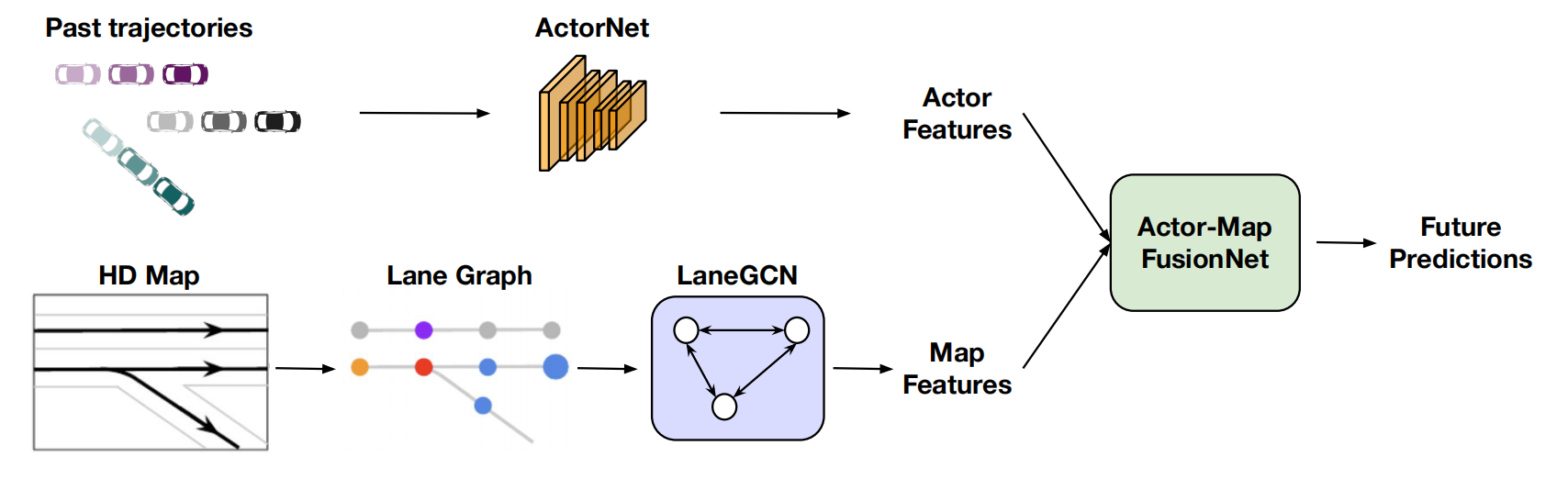
LaneGCN
1.0.0
Peringatan
Bucket Amazon AWS S3 argoai-argoverse yang menyimpan banyak file demo telah disusupi. File mungkin rusak.
File yang mereferensikan bucket S3 ini telah dimodifikasi, dan pengambilan apa pun dari bucket ini akan diberi komentar. Silakan lanjutkan dengan hati-hati.
Kertas | Slide | Halaman Proyek | Video Lisan ECCV 2020
Ming Liang, Bin Yang, Rui Hu, Yun Chen, Renjie Liao, Song Feng, Raquel Urtasun
Juara 1 Kompetisi Argoverse Motion Forecasting
Anda perlu menginstal paket berikut untuk menjalankan kode:
conda create --name lanegcn python=3.7
conda activate lanegcn
conda install pytorch==1.5.1 torchvision cudatoolkit=10.2 -c pytorch # pytorch=1.5.1 when the code is release
# install argoverse api
pip install git+https://github.com/argoai/argoverse-api.git
# install others dependancy
pip install scikit-image IPython tqdm ipdbmpi4py untuk pelatihan terdistribusi. Horovod lebih efisien dibandingkan nn.DataParallel untuk pelatihan mulit-gpu dan lebih mudah digunakan dibandingkan nn.DistributedDataParallel . Sebelum menginstal horovod, pastikan Anda telah menginstal openmpi ( sudo apt-get install -y openmpi-bin ). pip install mpi4py
# install horovod with GPU support, this may take a while
HOROVOD_GPU_OPERATIONS=NCCL pip install horovod==0.19.4
# if you have only SINGLE GPU, install for code-compatibility
pip install horovodjika Anda memiliki masalah apa pun mengenai horovod, silakan merujuk ke horovod github
Anda dapat memeriksa skripnya, dan mengunduh data yang diproses alih-alih menjalankannya berjam-jam.
bash get_data.sh # single node with 4 gpus
horovodrun -np 4 -H localhost:4 python /path/to/train.py -m lanegcn
# 2 nodes, each with 4 gpus
horovodrun -np 8 -H serverA:4,serverB:4 python /path/to/train.py -m lanegcnDibutuhkan 8 jam untuk melatih model dalam 4 GPU (RTX 5000) dengan horovod.
Kami juga menyediakan log pelatihan untuk Anda debug.
python train.py -m lanegcnAnda dapat mengunduh model terlatih dari sini
python test.py -m lanegcn --weight=/absolute/path/to/36.000.ckpt --split=test
python test.py -m lanegcn --weight=36.000.ckpt --split=val
Hasil kualitatif
Label(Merah) Prediksi (Hijau) Agen lain(Biru)
Hasil kuantitatif 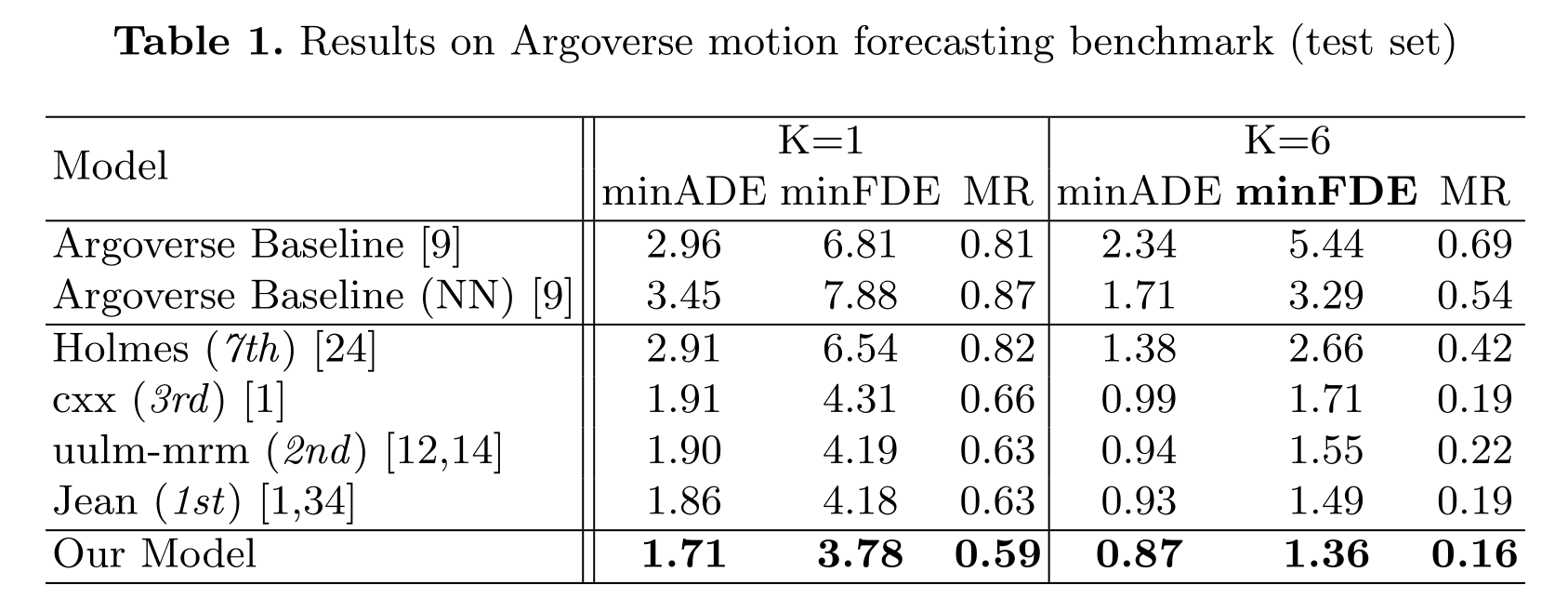
periksa LISENSI
Jika Anda menggunakan kode sumber kami, mohon pertimbangkan untuk mengutip yang berikut ini:
@InProceedings { liang2020learning ,
title = { Learning lane graph representations for motion forecasting } ,
author = { Liang, Ming and Yang, Bin and Hu, Rui and Chen, Yun and Liao, Renjie and Feng, Song and Urtasun, Raquel } ,
booktitle = { ECCV } ,
year = { 2020 }
}Jika Anda memiliki pertanyaan mengenai kode, silakan buka terbitan dan @chenyuntc.


