Car Simulator
1.0.0
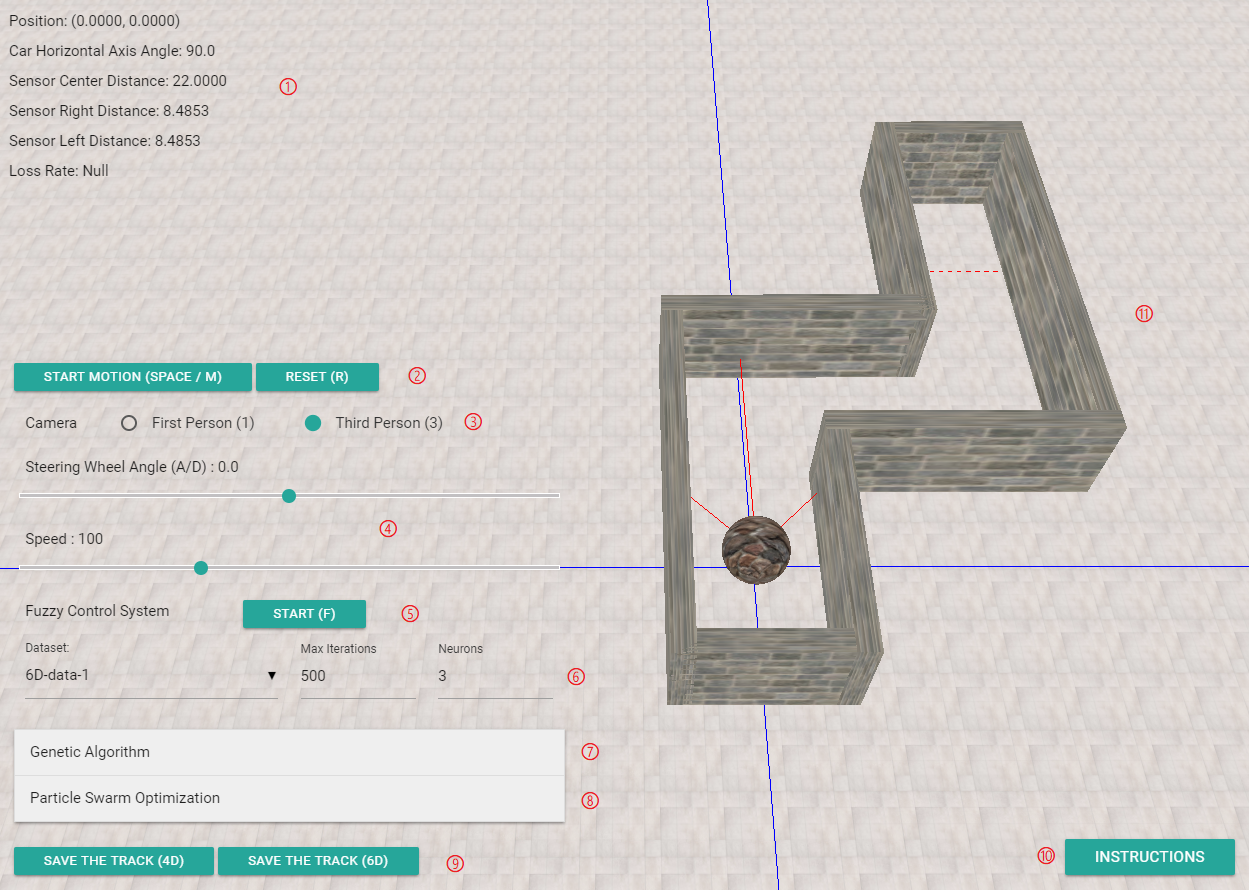
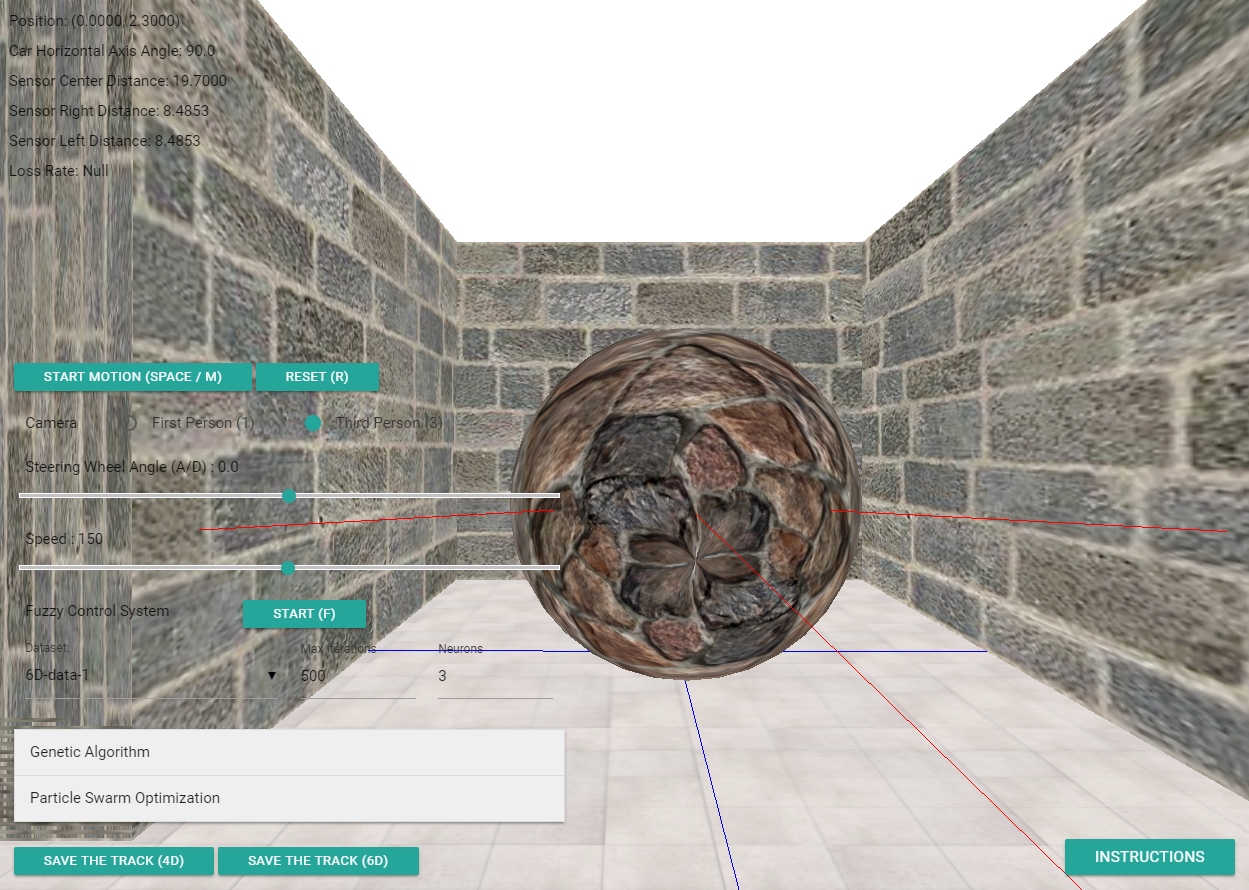
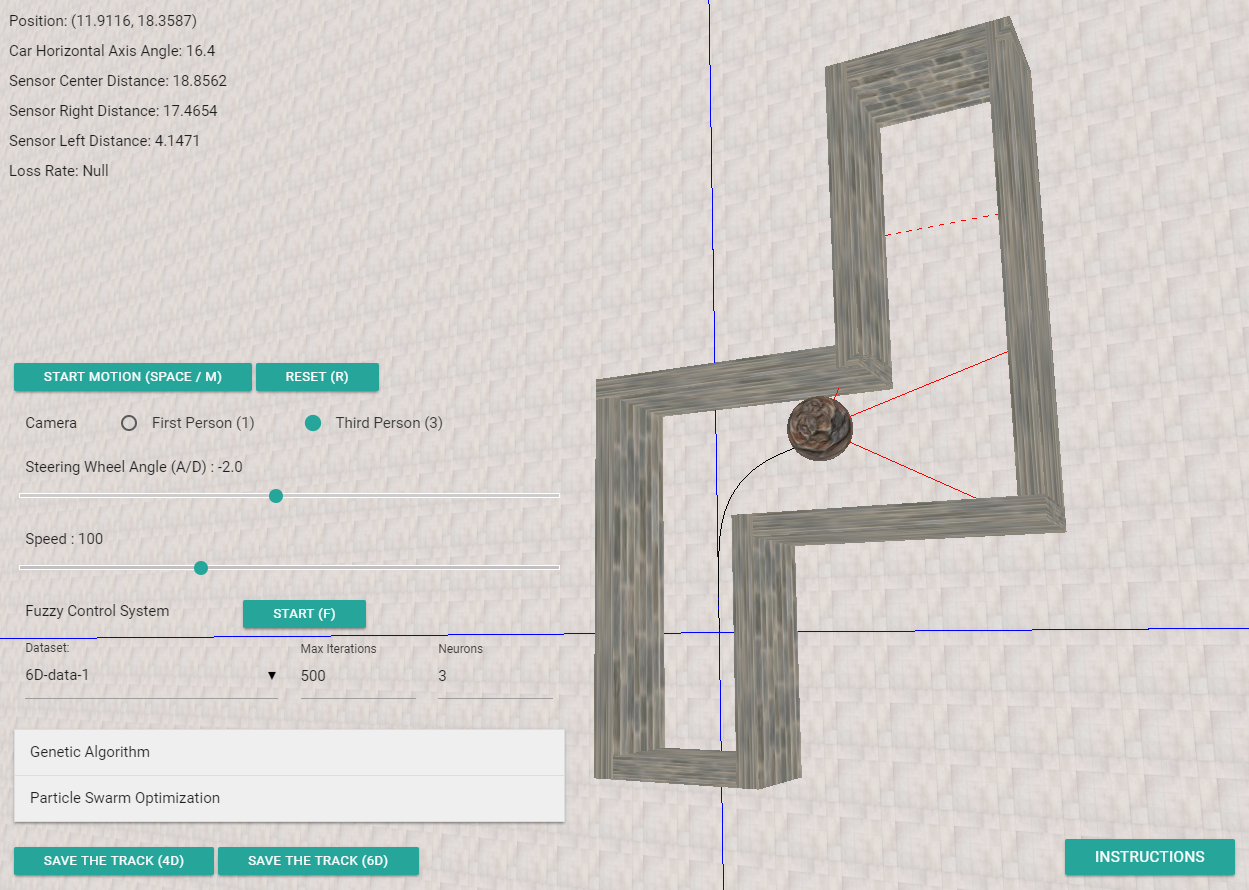
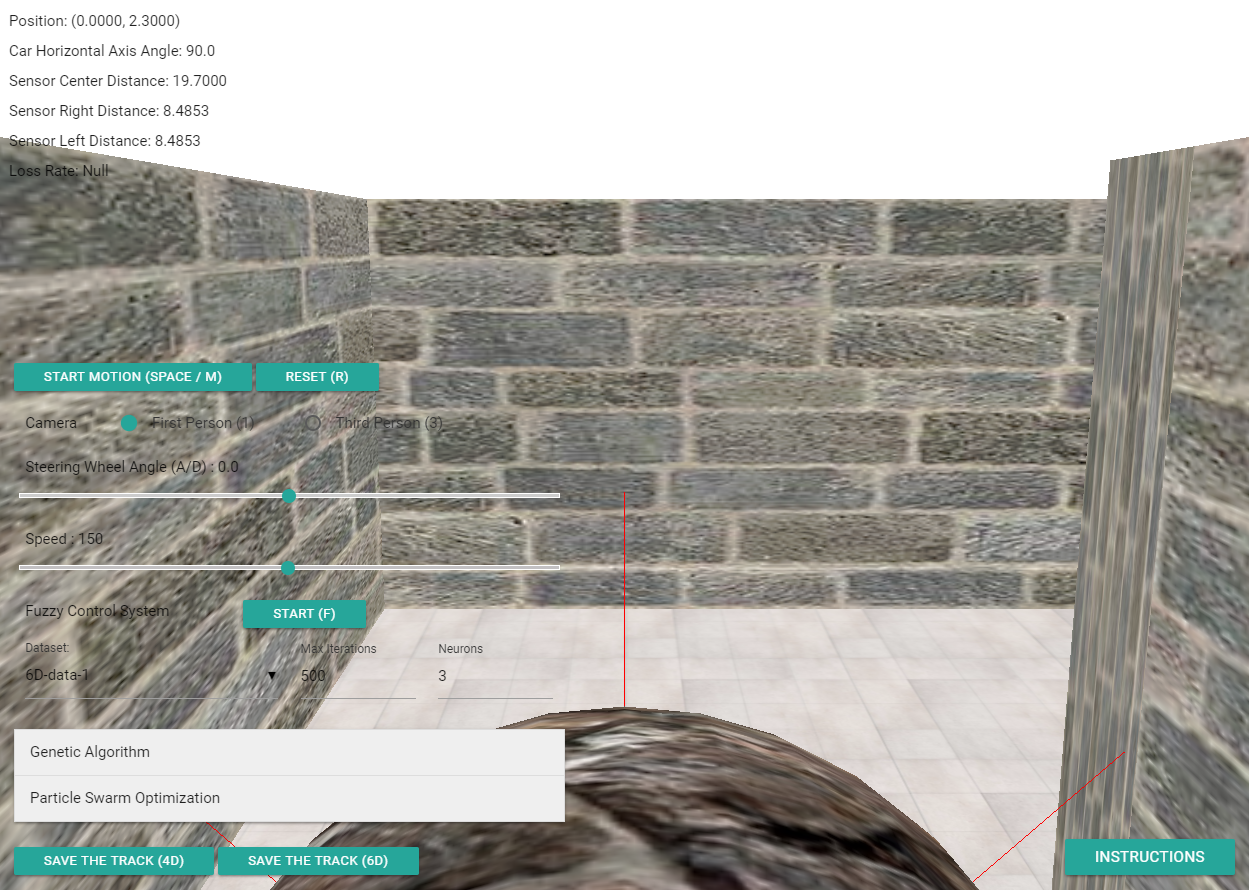
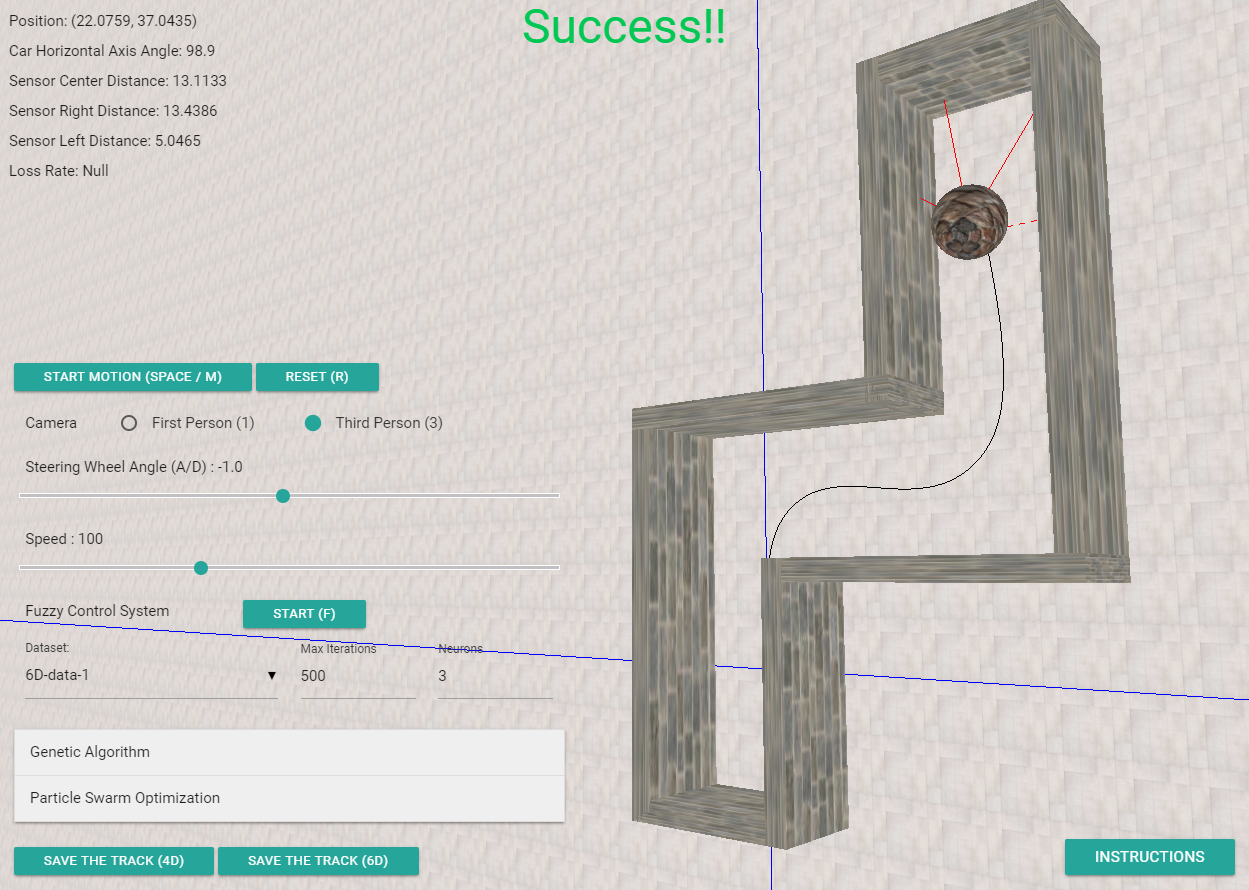
Simulator Mobil menggunakan sistem kontrol fuzzy, algoritma genetika, dan optimasi kawanan partikel untuk mensimulasikan pergerakan mobil otonom di peta. Ini juga mendukung perangkat VR, lihat di sini untuk detailnya.
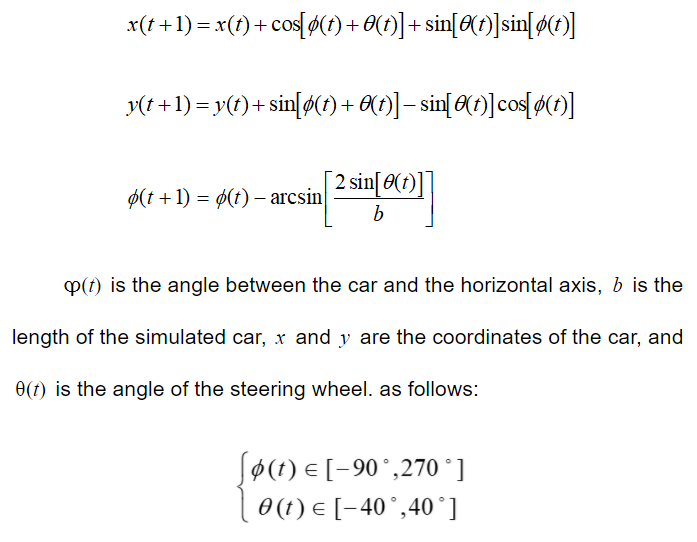
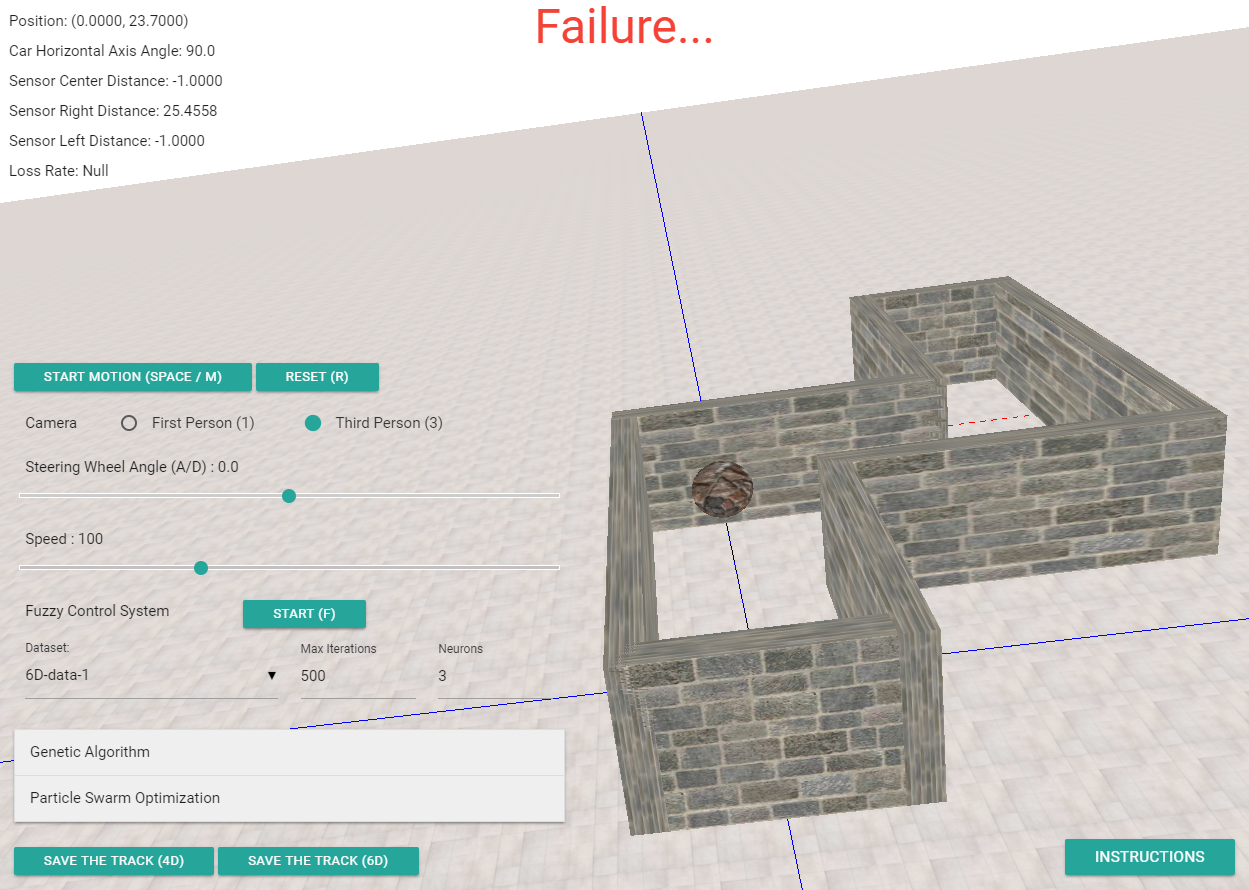
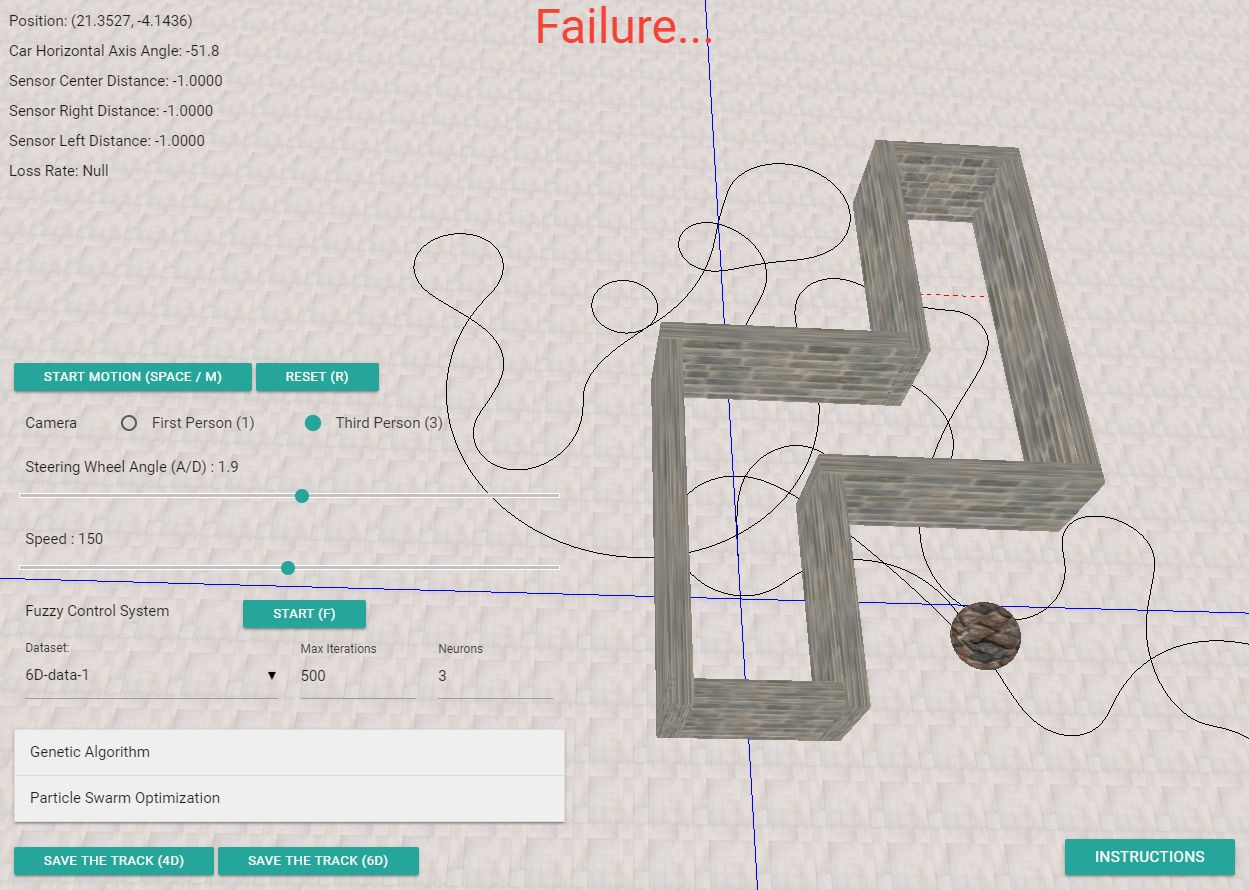
Inputnya berisi ketiga sensor jarak mobil (depan, 45 derajat kiri dan kanan), yang dapat diperoleh dari persamaan gerak yang ditentukan, posisi mobil dan sudut antara mobil dengan sumbu horizontal. Outputnya adalah sudut putaran roda kemudi.
Targetnya adalah mencapai garis akhir tanpa membentur dinding dan menampilkan lintasan pergerakan (termasuk posisi setiap titik waktu, nilai sensor, dan sudut putaran roda kemudi) sebagai file teks, kemudian ditampilkan pada antarmuka grafis.
Persamaan gerak mobil yang disimulasikan adalah sebagai berikut:
Sistem kontrol fuzzy menggunakan tujuh aturan fuzzy khusus dan defuzzifier pusat gravitasi diskrit. Lihat di sini untuk detailnya.
Simulator Mobil menggunakan algoritma genetika bernilai nyata (GA) untuk melatih jaringan fungsi basis radial (RBFN) dan mobil akan dikendalikan oleh RBFN. Gen didefinisikan sebagai tiga parameter RBFN (w, m, σ) dari vektor dimensi campuran. Fungsi kebugaran adalah varian rata-rata dari keluaran yang diharapkan dari kumpulan data dan keluaran RBFN dalam kasus masukan tertentu. Nilai fitness terendah merupakan parameter RBFN terbaik.
Struktur jaringan fungsi basis radial adalah sebagai berikut:
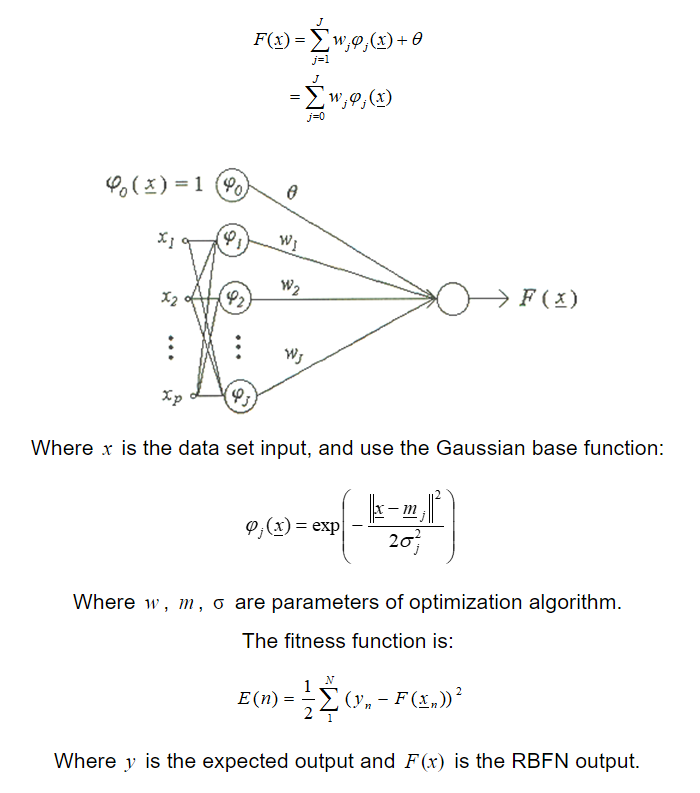
Car Simulator juga dapat menggunakan optimasi gerombolan partikel (PSO) untuk melatih RBFN. Koordinat PSO didefinisikan sebagai tiga parameter RBFN (w, m, σ) dari vektor dimensi campuran. Fungsi kebugaran adalah varian rata-rata dari keluaran yang diharapkan dari kumpulan data dan keluaran RBFN dalam kasus masukan tertentu. Nilai fitness terendah merupakan parameter RBFN terbaik.
https://jasonnor.github.io/Car-Simulator/
Car Simulator juga mendukung perangkat VR, silakan buka halaman ini.
InputA1 InputB1 InputC1 Output1
InputA2 InputB2 InputC2 Output2
...
Dimana InputA adalah nilai sensor jarak tengah, InputB adalah nilai sensor jarak kanan, InputC adalah nilai sensor jarak kiri dan output adalah sudut putaran kemudi. Kumpulan data default dapat ditemukan di sini.
InputA1 InputB1 InputC1 InputD1 InputE1 Output1
InputA2 InputB2 InputC2 InputD1 InputE1 Output2
...
Dimana InputA adalah koordinat X mobil, InputB adalah koordinat Y mobil, InputC adalah nilai sensor jarak tengah, InputD adalah nilai sensor jarak kanan, InputE adalah nilai sensor jarak kiri dan output adalah sudut putaran kemudi. Kumpulan data default dapat ditemukan di sini.
Silakan menggunakannya jika Anda tertarik untuk memperbaiki masalah dan berkontribusi langsung ke basis kode.
Car Simulator dirilis di bawah lisensi MIT. Lihat file LISENSI untuk detailnya.


