jetson nano baseboard
v1.4.6
Hak Cipta (C) 2020-2024 Antmicro

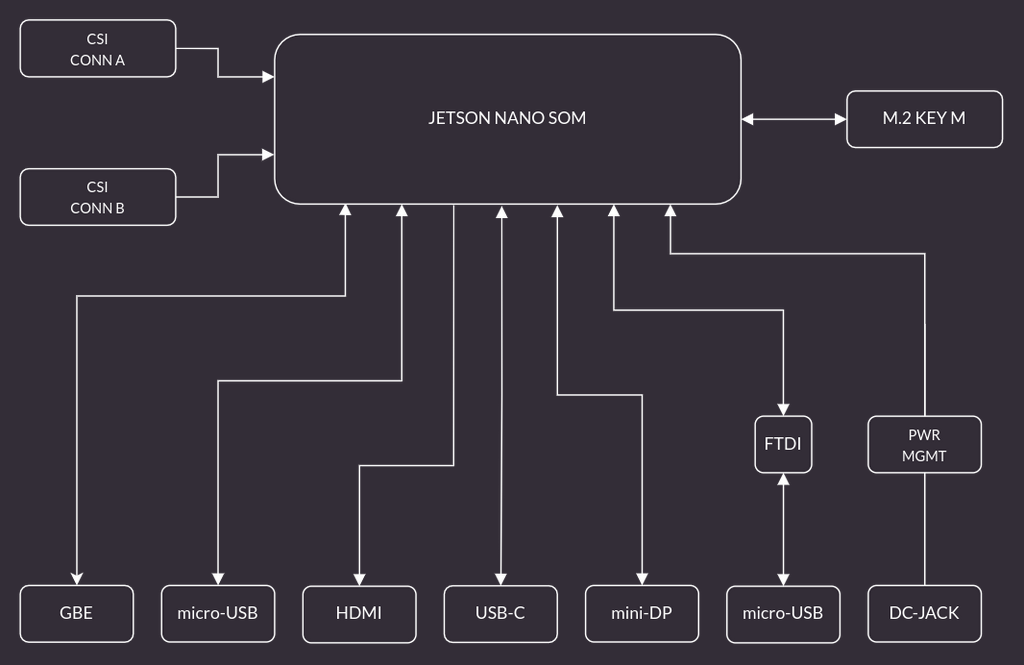
Proyek ini berisi file desain perangkat keras terbuka untuk alas tiang yang mendukung NVIDIA Jetson Nano, Xavier NX dan TX2 NX SOMS. Itu dibuat oleh Antmicro, perangkat keras kustom, perangkat lunak dan perusahaan teknik AI dan mitra ekosistem Jetson Nvidia. Papan dapat dihubungkan dengan perangkat video MIPI CSI-2 melalui konektor kabel datar fleksibel (FFC) yang bersatu, mendukung hingga 4 sensor dalam konfigurasi 2 jalur atau 3 sensor dalam konfigurasi 4 jalur. Silakan merujuk ke Panduan Desain Produk untuk SOM yang relevan untuk detail lebih lanjut mengenai pemetaan jalur CSI yang didukung. Anda akan menemukan sumber daya terkait SOM di Jetson Download Center NVIDIA.
Baseboard, varian khusus yang dirancang oleh Antmicro per spesifikasi pelanggan, dan aksesori penting dapat dibeli dari komponen robot yang mampu.
File desain untuk proyek ini mulai dari Rev. 1.5 disediakan dan dipelihara di KICAD. Revisi dewan yang lebih tua disiapkan di Altium Designer dan disimpan di cabang terpisah.
Direktori utama berisi file desain KICAD, lisensi, dan readme. File yang tersisa disimpan di direktori berikut:
img - berisi grafik untuk readme inidoc - Berisi skema yang dihasilkan dan dokumentasi lainnyalinux-patches - Berisi tambalan yang menambahkan dukungan kamera untuk modul kamera dari Allied Vision (lihat bagian BSP di bawah) Papan dapat diproduksi dan dirakit menggunakan file desain yang disediakan. Silakan lihat lapisan mekanis untuk informasi lebih lanjut mengenai stackup PCB yang direkomendasikan untuk fabrikasi. Papan dapat ditenagai dengan tegangan dalam kisaran 6-36VDC. Dianjurkan untuk menggunakan pasokan DC 12V 2A untuk memberi daya pada papan. Papan memiliki sequencer daya terintegrasi yang memulai modul secara otomatis setelah menerapkan catu daya.
Antarmuka I / O Baseboard didukung dalam Linux standar untuk BSP Tegra (L4T) yang disediakan oleh NVIDIA untuk Jetson Nano / Xavier NX / TX2 NX. BSP harus bekerja dengan Baseboard Jetson Open Source di luar kotak. Namun, untuk menggunakan alas tiang dengan berbagai kamera dan aksesori lain yang mungkin Anda perlukan untuk melakukan modifikasi. Jika Anda berencana untuk menggunakan papan dengan Allied Vision Alvium Image Sensor, ada direktori linux-patches , yang berisi file tambalan yang menambah dukungan untuk kamera penglihatan sekutu untuk alas tiang ini dengan modul Jetson Nano NX. Patch dinamai dengan rilis L4T dan dapat diterapkan pada cabang yang sesuai dari repositori Linux yang dirilis oleh Allied Vision. Layanan Antmicro melibatkan pengembangan BSP sehingga Anda dapat mempekerjakan kami untuk membuat modifikasi yang diperlukan untuk Anda.
Anda dapat menggunakan konektor antarmuka USB OTG untuk mengunggah gambar BSP ke SOM yang dimasukkan ke dalam alas tiang.
Sebagian besar pesan debug disediakan melalui konsol serial. Papan ini mencakup chip FTDI yang menyediakan antarmuka UART ke PC host. Silakan merujuk ke lembar skematik untuk lebih jelasnya. Saluran UART debug default dapat diakses melalui /dev/ttyUSB0 (dengan asumsi bahwa tidak ada unit FTDI lain yang terhubung ke PC Anda). Baudrate default untuk koneksi debug serial adalah 115200 baud dengan transmisi 8-bit, 1 stop bit dan tanpa kontrol aliran.
Revisi terbaru dari papan (1.5.x) mencakup file desain yang dikonversi menjadi KICAD. BOM telah diubah sehingga dewan dapat diproduksi meskipun situasi kekurangan chip global. Revisi 1.5.x Mengubah multiplexer I2C (PCA9548 -> PCA9547) yang digunakan untuk menangani kamera dan aksesori video. Anda mungkin perlu menyesuaikan entri DeviceTree untuk aksesori video agar mereka bekerja dengan chip multiplexer I2C yang baru.
Proyek ini dilisensikan di bawah lisensi APACHE-2.0.


