Simulator Controller
1.0.0
시뮬레이터 컨트롤러는 Sim Racing을 위한 확장 가능한 모듈형 관리 및 컨트롤러 애플리케이션입니다. 핵심에는 버튼 박스와 같은 거의 모든 외부 컨트롤러 하드웨어를 사용하여 SimHub, SimFeedback 등과 같은 일반적인 시뮬레이터 구성 요소를 제어할 수 있는 포괄적인 플러그인 가능 자동화 프레임워크가 있습니다. 그 외에도 Simulator Controller에는 인공 지능 기술을 기반으로 하는 여러 음성 채팅 지원 도우미도 함께 제공됩니다. 첫 번째는 가상 레이스 엔지니어의 일종으로 레이스 중에 손을 계속 운전할 수 있도록 도와줄 것입니다. 피트스톱 준비, 일기 예보 확인, 랩 타임에 미치는 피해 영향 계산 등과 같은 모든 번거로운 작업을 처리합니다. 가상 레이스 전략가인 두 번째 보조자는 전반적인 레이스 상황을 주시하고 레이스 위치, 교통 및 날씨 변화에 따라 전략을 개발하고 적용합니다. 다음 어시스턴트인 가상 레이스 스포터(Virtual Race Spotter)가 귀하의 레이스를 지켜보고 근처 차량 등의 중요한 상황에 대해 경고해 줄 것입니다. 마지막으로, 가상 운전 코치는 자동차 핸들링과 실제 세계 또는 시뮬레이션 경주에 관해 알고 싶은 모든 정보를 얻을 수 있는 귀중한 소스가 될 것입니다. 그리고 그는 당신이 트랙에 있는 동안 귀중한 지침을 제공함으로써 운전 기술을 향상하도록 지도할 수 있습니다.
그 외에도 Simulator Controller는 우리 모두의 가상 레이서의 삶을 더욱 재미 있고 단순하게 만들어주는 다양한 기능과 기능을 제공합니다. 이 문서의 뒷부분에서 모든 기능에 대한 포괄적인 개요를 확인할 수 있지만, 먼저...
이 도구가 유용하다고 생각되면 추가 개발에 도움을 주세요. 기부된 모든 기부금은 프로젝트를 지원하는 데에만 사용됩니다.
또 다른 가능성은 Patreon을 사용하여 나를 안아주는 것입니다. 혜택으로 멀티플레이어 지구력 경주를 위해 공개 팀 서버에 액세스할 수 있습니다.
귀하의 지원에 진심으로 감사드립니다!
설치는 매우 쉽습니다. 처음 사용자에게는 아래의 자동 설치 프로그램을 사용하는 것이 좋습니다. 그러나 다양한 다운로드 및 설치 옵션을 사용할 수 있습니다. 자세한 내용은 설치 및 구성에 대한 전체 설명서를 참조하십시오. 여기에서 신규 사용자를 위한 빠른 시작 가이드도 찾을 수 있습니다.
Simulator Controller를 구축하는 데 사용되는 프로그래밍 언어는 Windows 응용 프로그램을 제어하기 위해 정말 불쾌한 트릭을 사용하며, 악성 코드에서도 사용되는 트릭입니다. 따라서 구체적인 바이러스 백신 프로그램에 따라 시뮬레이터 컨트롤러 응용 프로그램과 관련된 경고가 나타날 수 있습니다. 나는 그것에 대해 아무것도 없다고 확신할 수 있습니다. 그러나 AutoHotkey 자체 포럼에서 이러한 문제에 대해 읽을 수 있습니다. 바이러스 백신 프로그램이 예외 규칙을 허용하는 경우 시뮬레이터 컨트롤러 응용 프로그램에 대한 규칙을 정의하십시오. 그렇지 않으면 맥주를 마시고 다른 시뮬레이터 컨트롤러 도구를 검색해야 합니다. 죄송합니다...
자동 설치 프로그램을 사용하고 싶지 않거나 바이러스 백신 보호를 실행할 수 없는 경우 아래 버전 중 하나를 수동으로 설치할 수 있습니다. 현재 개발 빌드와 최소한 두 개의 최신 안정 릴리스에 대한 별도의 다운로드 링크가 있습니다. 이러한 빌드 중 하나를 다운로드하고 하드 디스크의 아무 곳에나 압축을 풉니다. 릴리스 3.5.2부터는 Binaries 폴더에서 "Simulator Tools" 애플리케이션을 실행해야 합니다. 그러면 나머지 설치 과정이 안내됩니다. 릴리스 정보는 물론 다음 안정 빌드의 향후 기능에 대한 미리 보기라도 릴리스 노트를 놓치지 마세요.
Simulator Controller.exe를 다운로드하여 실행하기만 하면 됩니다(바이러스 백신 또는 브라우저 다운로드 보호를 비활성화해야 할 수도 있음). 이 작은 애플리케이션은 버전 저장소에 연결되어 자동으로 최신 버전을 다운로드하고 설치합니다. 현재 버전이 아닌 다른 버전을 설치하려는 경우에도 문제 없습니다. 아래 버전 중 하나를 수동으로 다운로드하여 설치하면 가능하지만 사전에 설명서를 참조하세요.
다음은 몇 번의 클릭만으로 처음으로 시뮬레이터 컨트롤러를 구성하는 방법을 보여주는 짧은 비디오입니다.
매우 중요(이미 시뮬레이터 컨트롤러 설치를 구성한 사용자의 경우): 릴리스 2.0부터 로컬 구성 데이터베이스에 대한 자동 업데이트 메커니즘이 존재합니다. 시뮬레이터 컨트롤러 애플리케이션 중 하나를 시작하기 전에 업데이트 프로세스에 대한 정보를 주의 깊게 읽으십시오. 안전을 위해 사용자 문서 폴더에 Simulator Controller 폴더의 백업 복사본을 만드는 것도 좋은 생각일 수 있습니다. 또한 시험판 버전을 설치하여 사용한 경우 자동 업데이트를 다시 실행해야 합니다. 이를 수행하는 방법은 위에 언급된 문서를 참조하십시오.
5.9.9.0-릴리스(변경 사항: LLM 런타임을 최신 라마 백엔드 릴리스로 업데이트, "세션 데이터베이스"에서 동의 대화 상자 열기, MoTeC 가져오기 수정, 보조자를 위한 무작위 음성 처리 수정, 원격 측정 뷰어의 채널 버그 수정, 원격 측정의 트랙 섹션 편집기 뷰어.)
이 버전을 설치하고 사용하기 전에 릴리스 노트와 이 버전의 릴리스별 업데이트 노트 및 건너뛴 모든 버전을 읽어 보십시오.
5.9.8.0-릴리스(변경 사항: 브라우저에서 커뮤니티 원격 측정 및 전략 로드, 운전 코치 지침의 언어별 업데이트 수정, 엔지니어가 인사말에서 올바른 세션 유형 언급, Win 11의 상당한 성능 개선, 이탈리아어에 대한 날씨 음성 명령 수정, 새로운 음성 인식 라이브러리.)
5.9.7.1-릴리스(변경 사항: "시뮬레이터 설정"에서 화면 외부 컨트롤러 미리보기 처리, "시스템 모니터"에서 고아 상태 파일 처리 수정, 압력 손실에 대한 새로운 음성 명령, Spotter의 일부 중복 메시지 수정, 트랙 섹션 구성 간소화, 모든 언어의 모든 음성 명령에 대한 문서 추가, 팀 서버에서 랩 원격 측정 공유 수정, 사고 시점의 서스펜션 손상 보고 수정.)
6.0.0.0-베타(6.0.0용 오픈 베타. 변경 사항: 드라이빙 코치의 완전 대화형 코칭, 드라이빙 코치 플러그인에 "코칭" 및 "트랙코칭" 작업 추가, "코칭"용으로 설정된 Stream Deck 아이콘의 새 아이콘 및 "TrackCoaching" 작업, 코너별 코칭을 위한 새로운 설정, Driving Coach를 위한 스피커 및 청취자 부스터, "Driving Coach" 플러그인을 위한 새로운 컨트롤러 작업 기능, Telemetry의 섹션 탐색기 뷰어, 추론 부스터를 사용한 규칙 확장 지원, 운전 코치를 위한 많은 새로운 LLM 지침.)
이 버전을 설치하고 사용하기 전에 릴리스 노트와 이 버전의 릴리스별 업데이트 노트 및 건너뛴 모든 버전을 읽어 보십시오.
400페이지가 넘는 매우 광범위한 문서는 구성 프로세스를 안내하고 시뮬레이터 컨트롤러의 내부 개념과 모든 기능 및 특징을 이해하는 데 도움이 됩니다. 자신만의 플러그인을 만들고 싶은 개발자를 위해 완전한 개발자 가이드 및 참고 자료도 제공됩니다.
이 문서 Wiki의 소스 코드인 마크다운 파일은 Docs 폴더에서 찾을 수 있습니다.
상당히 광범위한 문서(500페이지가 넘습니다. 요즘에는 누구도 문서를 읽지 않는 것으로 알고 있습니다) 외에도 Discord 커뮤니티의 라이브 코칭 세션을 녹화한 비디오 튜토리얼 목록도 있습니다.
빠른 시작 가이드 - 이 비디오에서는 몇 번의 클릭만으로 첫 번째 실행 구성을 생성하는 방법을 보여줍니다.
설정 및 구성 - 시뮬레이터 컨트롤러 제품군의 일반적인 설정 및 구성에 대해 많은 것을 배우게 됩니다. 설정 마법사 "시뮬레이터 설정"이 소개되지만, 낮은 수준의 구성 도구인 "시뮬레이터 구성"도 살펴보겠습니다.
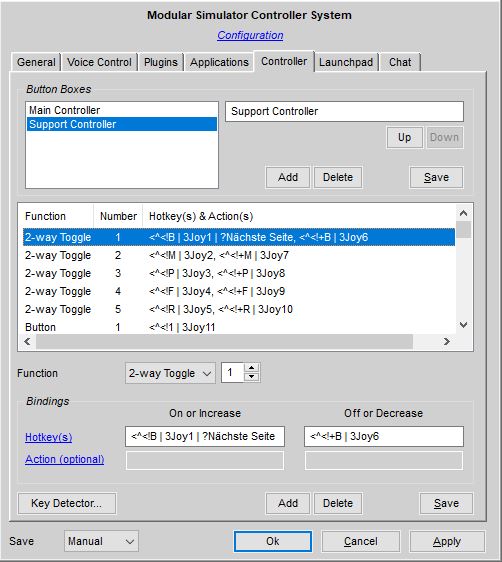
버튼 박스 및 스트림 데크 관리 - 여기에서는 버튼 박스, 스트림 데크 및 스티어링 휠과 같은 사용 가능한 하드웨어 컨트롤러를 구성하는 방법에 대해 자세히 설명합니다.
음성 제어 - 이 세션에서는 간단한 표준 구성부터 시작하여 다양한 보조자의 개별 이름, 음성 및 언어가 포함된 전체 구성까지 음성 제어 기능을 학습합니다.
Race Engineer를 사용한 피트스톱 자동화 - Race Engineer를 사용한 피트스톱 자동화를 살펴보겠습니다. 필요한 구성에 대한 모든 것을 배우고 트랙에서 작동하는 레이스 엔지니어를 보고 듣게 됩니다.
설정 관리 - 이 비디오에서는 가상 레이스 도우미가 사용하는 설정과 이러한 설정을 가장 효율적인 방법으로 관리하는 방법을 소개합니다.
Strategy Workbench 사용 - 이 비디오에서는 시뮬레이터 컨트롤러 제품군의 프리미엄 연료 계산기인 "Strategy Workbench"를 살펴봅니다. 또한 "Team Center"에서 생성된 전략을 사용하는 방법과 Virtual Race Assistance를 사용하는 방법도 배우게 됩니다.
팀 레이스 소개 - 이 비디오에서는 시뮬레이터 컨트롤러 제품군의 모든 기능이 함께 모여 팀 레이스를 관리하고 제어합니다. 모든 설정 방법, 팀 레이스 중 레이스 어시스턴트 서비스 사용 방법, 현재 운전 중인 팀 동료의 피트스톱 설정을 원격 제어하는 방법을 배우게 됩니다.
레이스 어시스턴트에 대한 추가 정보 - 지난 비디오에서 레이스 어시스턴트에 대해 여기저기서 조금 배운 후, 이번 비디오는 완전히 레이스 어시스턴트 전용입니다.
설정 워크벤치 작업 - 설정 워크벤치는 자동차 설정 작업을 돕는 도구입니다. 처리 문제를 해결하고 이를 해결하는 방법에 대한 권장 사항을 제시합니다. 몇 가지 시뮬레이터의 경우 권장 사항을 자동으로 적용한 후 설정 파일을 로드, 수정 및 다시 쓸 수 있습니다.
여러 운전자의 데이터 작업 - 이번에는 원격 측정 데이터베이스에 있는 여러 운전자의 데이터로 작업하는 방법과 이 데이터에서 팀 전략을 만드는 방법을 배우게 됩니다. 또한 원격 측정 데이터베이스에서 데이터를 내보내고 가져오는 방법도 살펴보겠습니다.
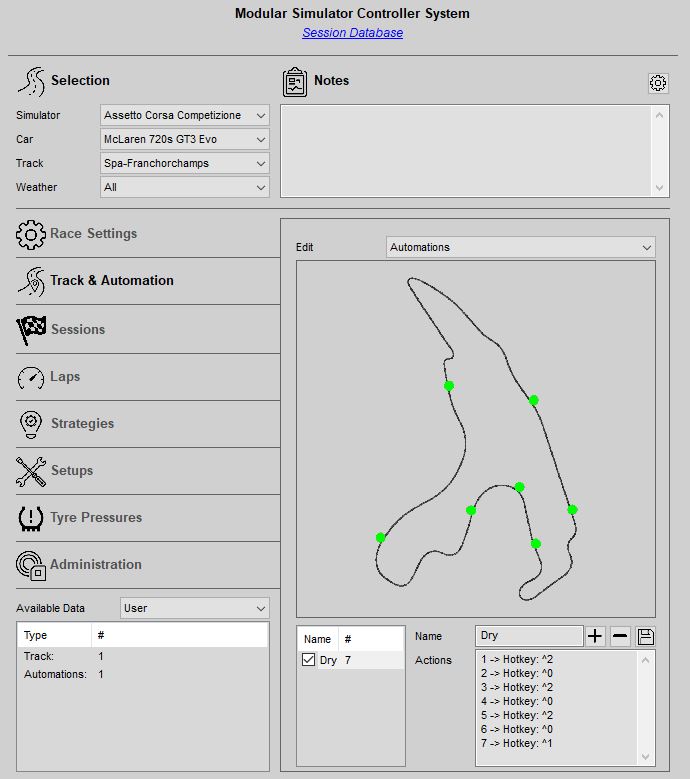
트랙 매핑 및 트랙 자동화 - 이 비디오에서는 모든 시뮬레이터의 모든 트랙에 대한 트랙 맵을 생성하는 방법과 이러한 트랙 맵을 사용할 수 있는 위치를 보여줍니다. 특별한 사용법은 트랙 위의 위치에 따라 트랙션 컨트롤이나 ABS와 같은 차량 내 설정을 자동화하는 것입니다. 이는 비디오 끝 부분에서 트랙에서 시연됩니다.
타이어 컴파운드 및 날씨 모델 - 이 세션에서는 시뮬레이터별 타이어 컴파운드를 다루는 방법을 다룹니다. 선택한 자동차에 사용 가능한 컴파운드를 구성하는 방법을 배우고 시뮬레이터 컨트롤러의 날씨 모델을 살펴보고 이것이 전략 시뮬레이션에서 타이어 컴파운드와 함께 사용되는 방법을 배우게 됩니다.
팀 데이터 복제 - 이 비디오에서는 팀 서버를 사용하여 팀에서 원격 측정 및 기타 데이터를 공유하는 방법을 보여줍니다. 그런 다음 이 데이터를 사용하여 팀 전략을 만들거나 팀 레이스 등에서 계획되지 않은 피트스톱에 대한 타이어 압력을 검색할 수 있습니다.
운전 스타일 분석 및 문제 처리 - 이 비디오는 운전 중 설정(또는 운전 스타일)의 처리 문제를 자동으로 감지하는 완전히 새로운 문제 분석기를 사용하는 방법을 보여줍니다. 그런 다음 처리 문제를 설정 워크벤치로 전송하여 자동차 설정을 수정할 수 있습니다.
레이스 설정에 대한 전문가 가이드 - 이 비디오는 레이스 어시스턴트가 사용하는 모든 설정에 대한 완전한 개요를 제공합니다. 예를 들어 레이스 엔지니어가 최악의 조건에서도 성공적인 피트스톱을 처리하는 데 필요한 모든 내용을 제공합니다.
자신만의 음성 명령 만들기 - 이 비디오에서는 시뮬레이터 컨트롤러의 모든 부분뿐만 아니라 시뮬레이션 게임의 모든 기능을 제어하기 위해 자신만의 음성 명령을 정의하는 방법을 배웁니다.
전략 개발 재검토 - 이 비디오에서는 ACC 시연을 포함하여 경주 중 전략 개발 및 처리를 위한 몇 가지 새로운 기능을 다룹니다.
AI가 완전히 제어하는 레이스 - 이 비디오는 AI 보조자가 완벽하게 제어하는 레이스의 전체 시연을 제공합니다. 이 3회 경주에서는 운전자 상호 작용이 필요하지 않았습니다. 솔로 및 멀티 플레이어 팀 레이스에서 완벽하게 지원됩니다.
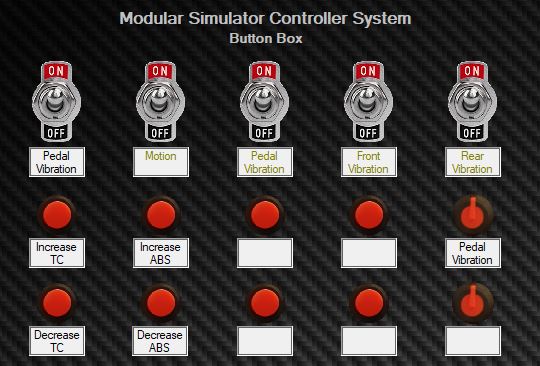
사용자 정의 버튼 상자 모드 정의 - 이 비디오에서는 사용자 정의 명령을 사용하여 자신만의 버튼 상자 레이어를 정의하는 방법을 보여줍니다.
언박싱 솔로 센터 - 연습 세션과 솔로 레이스, 그리고 해당 세션 중에 수집된 데이터를 정리할 수 있는 "솔로 센터"에 대해 자세히 살펴보고 있습니다.
5.3으로 구성 업데이트 - 이 비디오에서는 많은 구성 작업을 크게 단순화하는 "시뮬레이터 설정"의 새로운 기능을 사용하도록 구성을 업데이트하는 방법을 보여줍니다.
개인 운전 코치 - 가상 운전 코치인 Aiden과의 일반적인 상호 작용을 보여줍니다.
자동차 메타 데이터 - 이 비디오에서는 개조된 자동차에 대한 "설정 워크벤치"를 확장할 때 필요한 자동차 메타 데이터와 모든 비밀 지식을 소개합니다.
시작 프로필 사용 - 이 비디오에서는 구성을 정의하고 다양한 유형의 세션에 대해 많은 중요한 기능을 활성화 또는 비활성화할 수 있는 시작 프로필에 대해 자세히 설명합니다.
전략 개발 재검토 - 이 비디오에서는 "전략 워크벤치"를 다시 살펴보고 매우 특별한 전략을 만들 수 있는 몇 가지 새로운 옵션을 보여줍니다.
도우미를 GPT에 연결 - 도우미를 위한 새로운 GPT 기반 대화 부스터를 소개합니다. 이 부스터를 사용하면 보조자와 매우 실제적인 의사소통을 할 수 있습니다.
GPT를 사용하여 어시스턴트 확장 및 사용자 정의 - 사용자 정의 동작을 생성하거나 기존 동작을 변경하기 위해 LLM에서 사용할 고유한 이벤트 및 작업을 정의하는 방법을 배우게 됩니다.
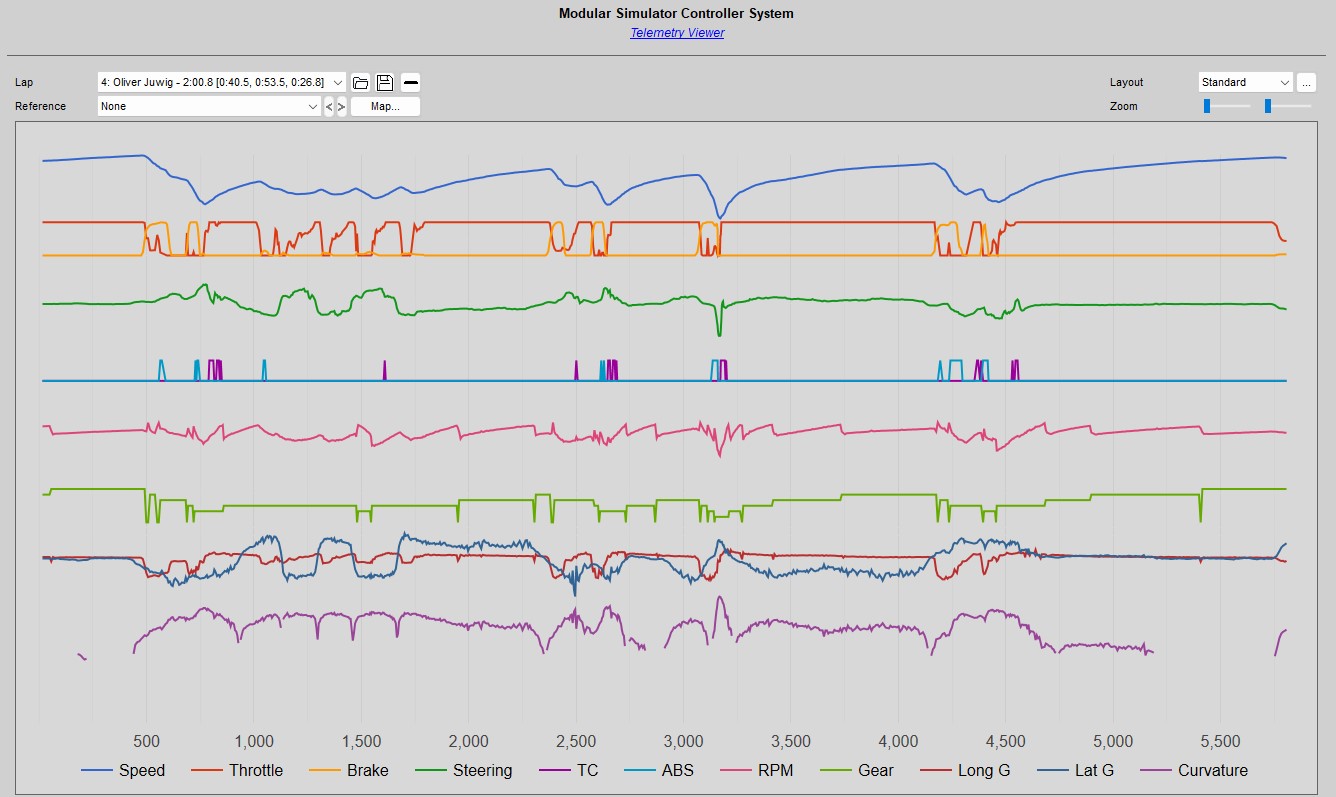
원격 측정 데이터 관리 - 이 비디오에서는 원격 측정 데이터 시스템을 보여주고 다양한 애플리케이션이 원격 측정을 수집하는 방법과 이를 통해 수행할 수 있는 작업을 보여줍니다.
AI의 트랙 코칭 - 드라이빙 코치의 트랙 코칭 레슨을 시연합니다. 코치는 원격 측정 데이터를 준비하고 이를 기준 랩 데이터와 비교한 후 코너별로 개선하는 방법을 지시합니다.
이 목록은 새로운 기능을 포함하기 위해 수시로 확장됩니다.
Discord의 시뮬레이터 컨트롤러를 위한 작고 아주 어린 커뮤니티의 일원이 되고 싶다면. 여기에서는 다양한 FAQ 모음을 찾을 수 있으며 매주 월요일 실시간 코칭 세션에 참석할 수 있습니다. Discord 서버에 가입하려면 이 초대를 사용하세요.
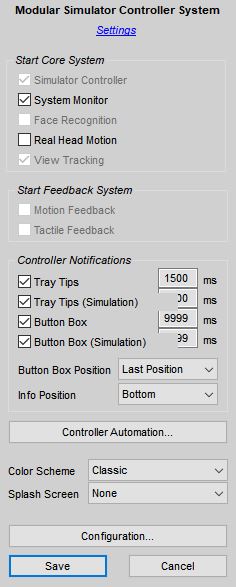
시뮬레이터 컨트롤러에는 경주 전반에 걸쳐 안내할 수 있는 가상 보조자 세트가 함께 제공됩니다. 보조자를 제어하려면 버튼 상자와 같은 컨트롤러를 사용하거나 자연스러운 음성 대화에서 직접 상호 작용할 수 있습니다. 또한, 내장된 여러 응용 프로그램은 설정 및 전략 개발을 지원하거나 경주 모니터링 및 제어 등을 지원합니다.
버튼 박스, 스트림 데크 등과 같은 모든 외부 컨트롤러를 단일 제어 센터에 연결하세요.
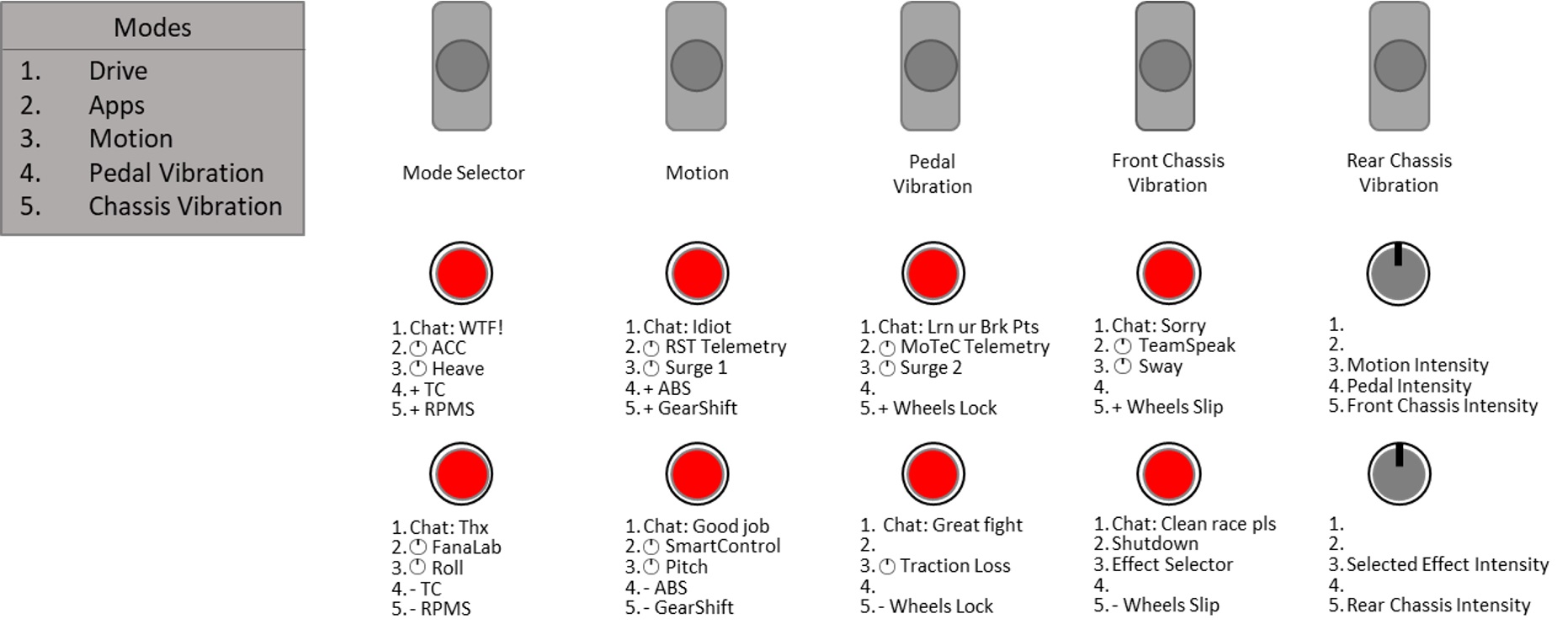
컨트롤러 작업에 대한 구성 가능한 시각적 피드백
가상 레이스에 사용되는 시뮬레이션 게임을 포함하여 모든 추가 애플리케이션을 원하는 대로 구성하세요.
여러 플러그인이 기본적으로 제공됩니다.
음성 또는 제스처 인식 소프트웨어와 같은 외부 소스에서 모든 기능과 작업을 트리거하여 항상 손을 운전대에 유지하는 추가 지원
게임 내 시야각을 제어하기 위한 시각적 머리 추적 지원 내장 - 아래 타사 애플리케이션 참조
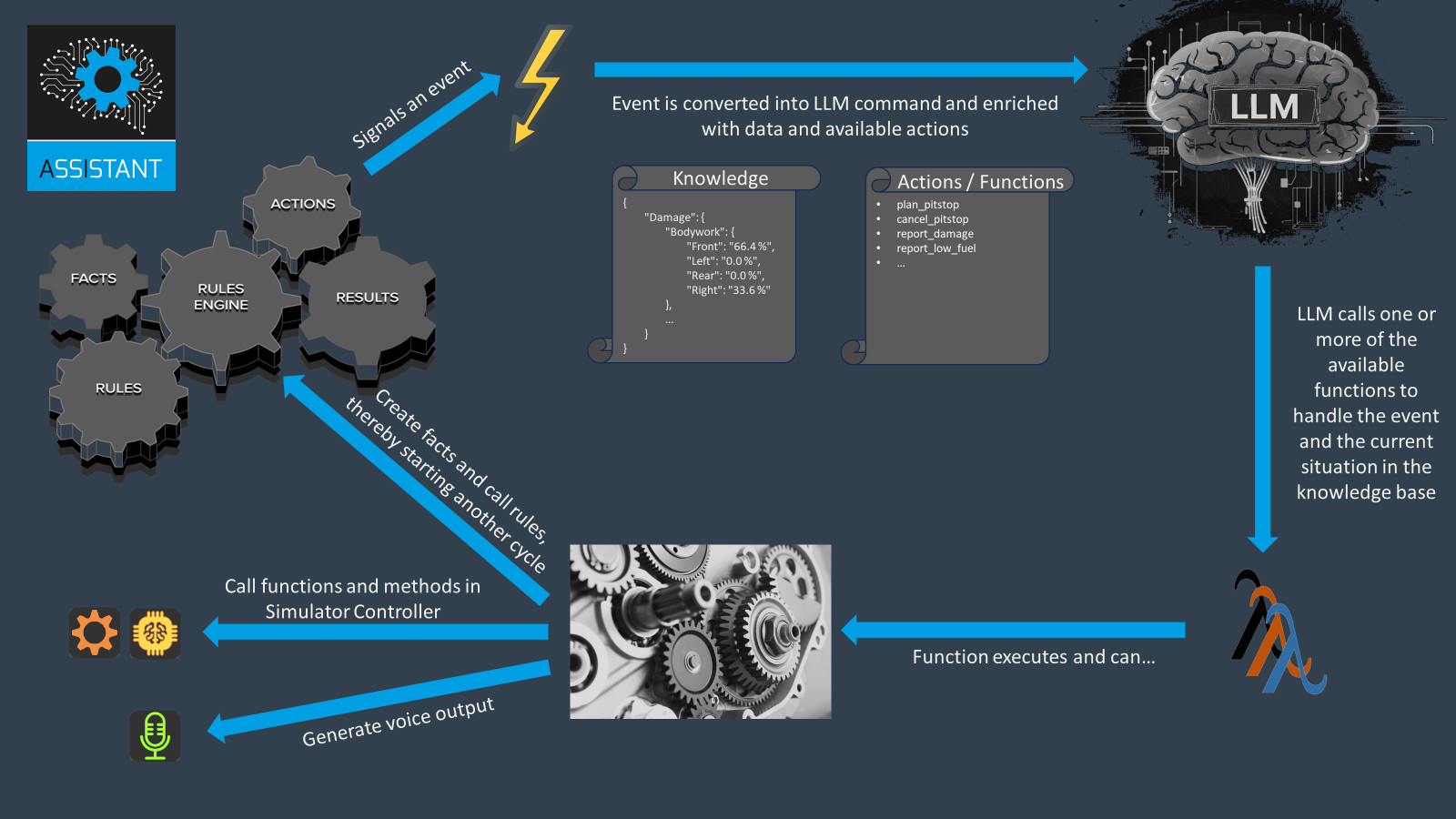
시뮬레이터 컨트롤러는 AI 기반 챗봇 엔진을 기반으로 가상 피트 크루를 제공합니다. 이 엔진의 중심에는 음성 인식 및 음성 합성이 결합된 하이브리드 규칙 엔진이 있습니다. 규칙 엔진은 모든 작업이 이벤트 기반이고 많은 양의 데이터를 사용하기 때문에 일반적인 피트 크루의 작업에 매우 적합합니다.
음성 및 자연어를 활용하여 승무원과 소통할 수 있습니다. 음성 명령은 패턴 기반이지만 선택적으로 각 피트 크루 구성원(시뮬레이터 컨트롤러의 Race Assistant라고 함)을 GPT 서비스에 연결하고 LLM(대형 언어 모델이라고도 함)의 자연어 기능을 사용하여 승무원의 대화 전문성을 높일 수 있습니다. 회원.
Handsome.ai (인터넷에서 찾을 수 있는 수백 개의 성숙도 모델 중 하나)의 성숙도에 따르면 시뮬레이터 컨트롤러의 레이스 보조 장치는 레벨 3(지원)과 4(자율) 사이에 있습니다. 이들은 귀하의 경주를 관찰하고 추천을 제공하며 전략 관리, 피트스톱 계획 및 준비와 같은 특정 작업에 대한 책임을 맡을 수 있습니다.

Assistant는 텍스트 기반 GPT 기술을 기반으로 하며 방대한 양의 정보로 훈련된 공개적으로 사용 가능한 대규모 언어 모델을 사용합니다. 이 지식을 사용하여 이 보조자는 개인 운전 코치 역할을 합니다. 운전 코치는 귀하의 활동적인 승무원의 일원은 아니지만 경주, 자동차 핸들링 및 운전 기술에 대해 무엇이든 물어볼 수 있으며 아마도 흥미로운 답변을 얻게 될 것입니다.
사진을 클릭하시면 운전 코치와의 실제 대화를 들으실 수 있습니다.
운전 코치는 원격 측정 데이터를 사용하여 트랙에서 운전하는 동안 코너링 성능을 향상시키는 방법에 대한 지침을 제공할 수도 있습니다.
가상 운전 코치는 OpenAI, Mistral 등의 LLM 런타임을 사용할 수 있지만 PC가 충분히 강력하다면 Llama, Falcon, Mistral, GPT 등과 같은 다양한 LLM 아키텍처에 통합 런타임을 사용할 수도 있습니다. 시뮬레이터 컨트롤러와 함께 제공되는 로컬 런타임을 사용하거나 Ollama 또는 GPT4All과 같은 도구를 사용합니다.
완전한 대화 가능 음성 제어 기능을 갖춘 AI 기반 레이스 엔지니어는 레이스 전반에 걸쳐 안내하고 중요한 기술 문제에 대해 경고하며 피트스톱에 도움을 줄 것입니다. 반면 레이스 전략가는 레이스 위치를 주시하고 피트스톱 전략을 개발하며 곧. 이러한 스마트 채팅 봇은 독립적인 애플리케이션이지만 현재 프로세스 간 통신을 사용하여 ACC 및 기타 시뮬레이션 게임 플러그인과 통합되어 있습니다. 새로운 시뮬레이션 게임을 통합하려면 특히 시뮬레이션 게임에서 필요한 데이터를 수집하는 데 약간의 노력이 필요하지만, 지식이 풍부한 프로그래머라면 약 3~4시간 안에 이를 관리할 수 있습니다.
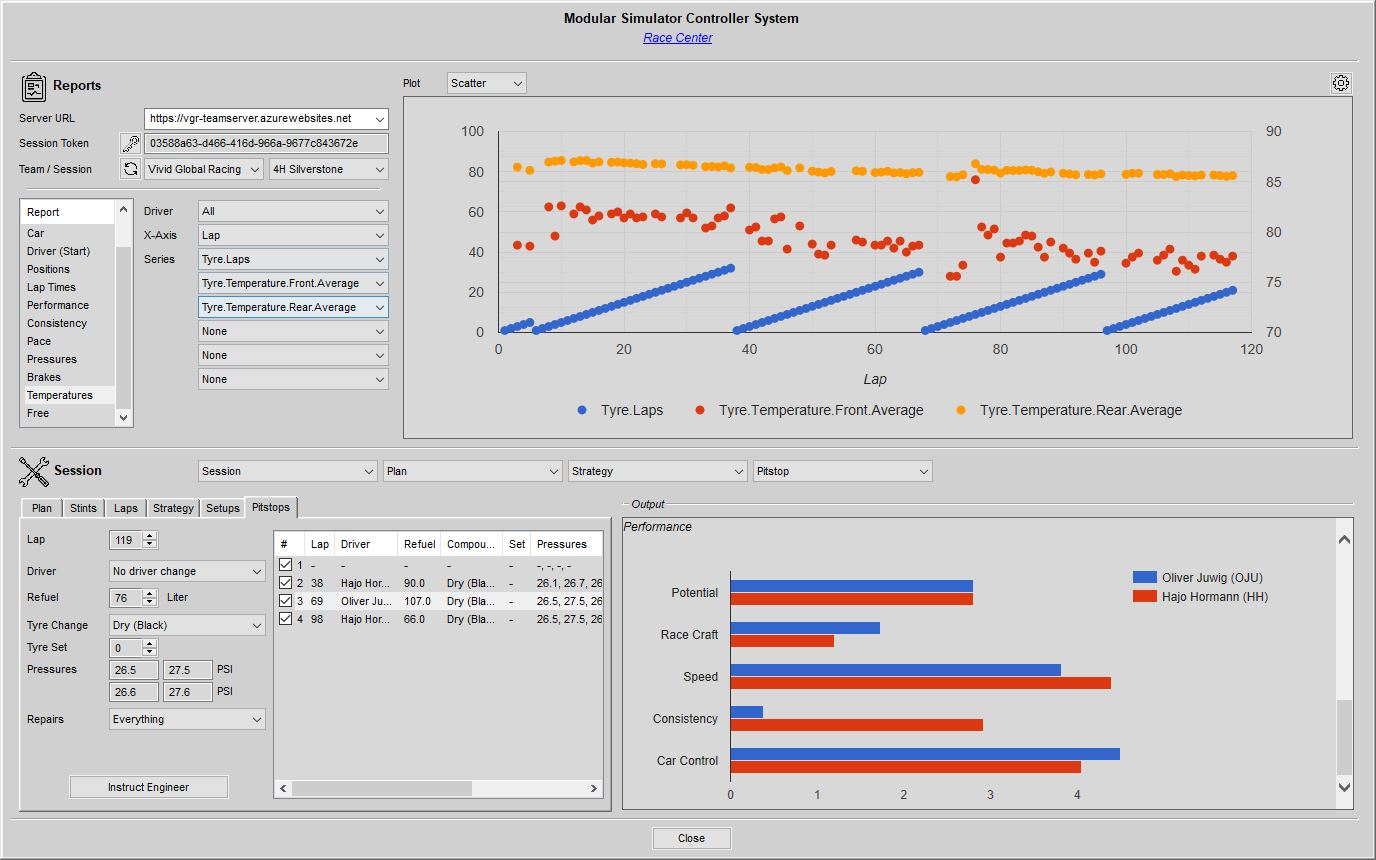
세션 중에 Virtual Race Assistant가 수집한 데이터 세트를 기반으로 하는 매우 유연한 도구를 사용하면 귀하의 성과와 상대방의 성과를 다양한 방법으로 분석할 수 있습니다.

가상 레이스 전략가의 또 다른 기능은 유사한 조건에서 동일한 트랙에서 진행된 과거 세션의 원격 측정 데이터를 사용하여 다가오는 레이스에 대한 전략을 개발하는 동안 사용자를 지원하는 것입니다.

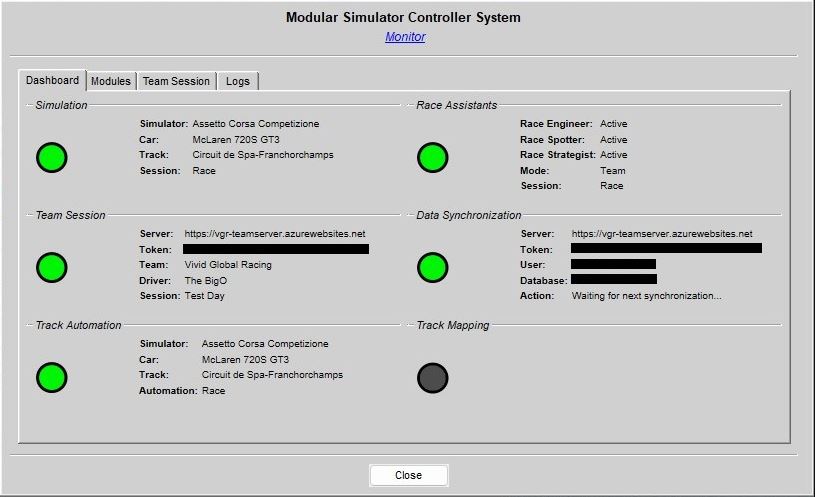
레이스 어시스턴트의 상태와 지식을 처리하고 모든 참가 드라이버 간에 이 정보를 공유하는 팀 서버를 사용하여 멀티플레이어 팀 레이스 중에 이러한 모든 기능을 사용할 수도 있습니다. Team Server는 모든 종류의 세션 데이터를 수집하고 세션의 다양한 측면을 원격 제어하기 위해 모든 팀 구성원(활성 드라이버가 아니더라도)이 사용할 수 있는 콘솔인 소위 "Team Center"의 백엔드입니다. 예를 들어 다가오는 피트스톱에 대한 설정입니다.
이 영상을 통해 어려운 경주에서 이 모든 부분이 함께 작동하는 모습을 확인하세요.
시뮬레이터 컨트롤러에는 주변 교통 상황을 감시하고 중요한 상황에 대해 경고하는 Virtual Spotter도 함께 제공됩니다. Spotter가 제공하는 정보를 특정 요구 사항과 취향에 맞게 완전히 맞춤 설정할 수 있습니다.
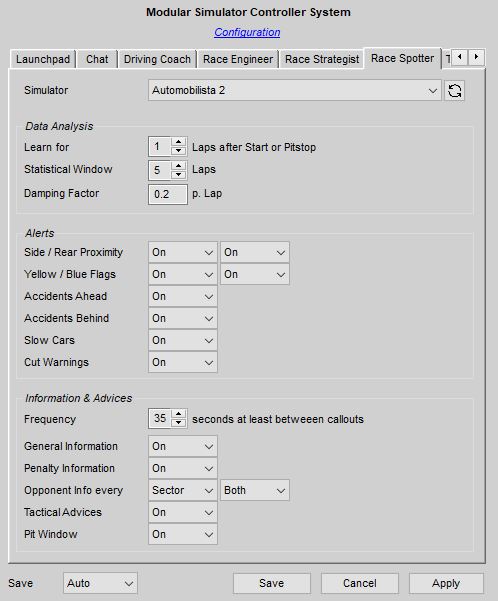
Spotter의 일반적인 임무 외에도 이 보조자는 트랙에서의 위치에 따라 다양한 작업을 자동화할 수도 있습니다. 예를 들어, 급회전에 접근할 때 트랙션 컨트롤을 자동으로 줄일 수 있습니다.
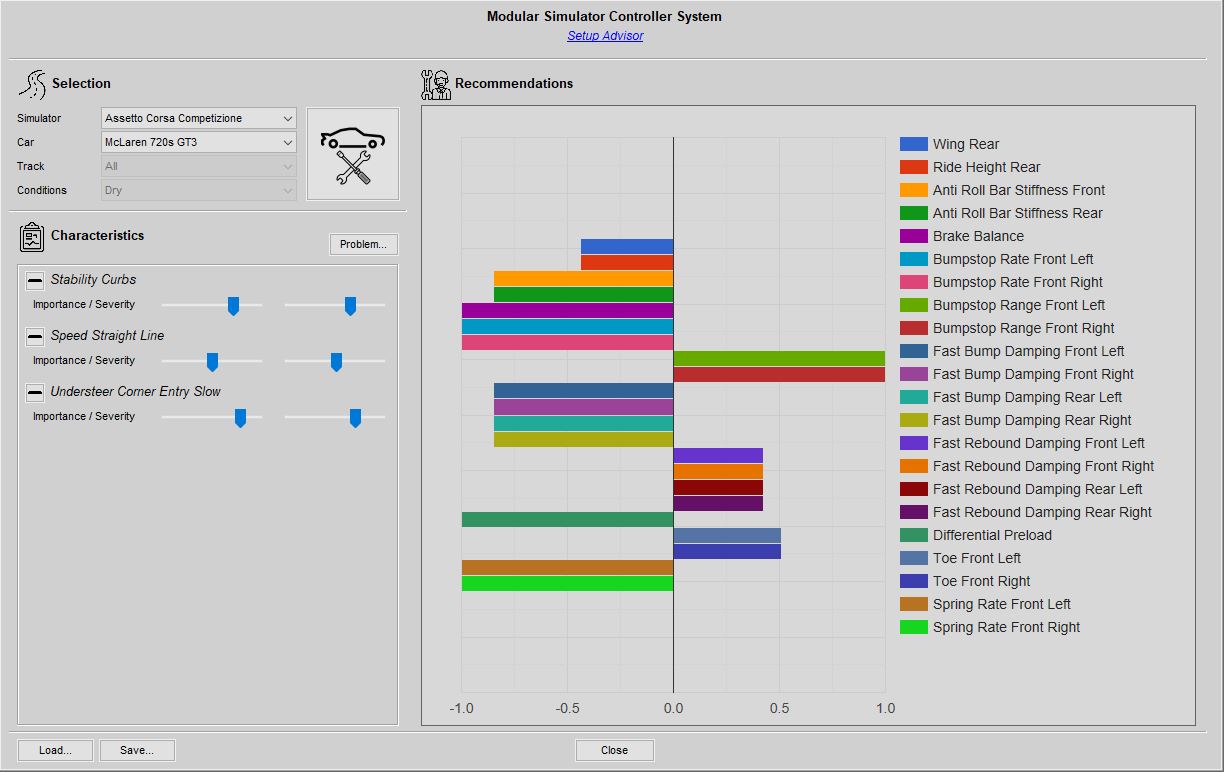
시뮬레이터 컨트롤러 제품군의 또 다른 매우 유용한 도구는 Setup Workbench입니다. 이 도구는 Race Assistant가 사용하는 AI 기술을 기반으로 하며 운전자가 설명하는 핸들링 문제를 기반으로 자동차의 설정 옵션 변경에 대한 권장 사항을 생성합니다.
시뮬레이터 컨트롤러는 간단한 매크로 언어를 사용하여 키보드 및 기타 입력 장치를 스크립트 기능에 연결할 수 있는 매우 정교하고 객체 지향적인 Windows 자동화 및 스크립팅 언어인 AutoHotkey에서 광범위하게 구현되었습니다. 반면에 AutoHotkey에는 마우스 클릭과 키보드 입력을 시뮬레이션하여 외부 API를 제공하지 않는 소프트웨어 패키지를 자동화하는 많은 로봇 공학 기능도 있습니다. AutoHotkey 언어를 사용하여 자신만의 플러그인을 작성할 수 있습니다. 시작하려면 간단한 것부터 고급까지 다양한 복잡성을 지닌 모든 번들 플러그인에 대한 전체 소스 코드가 포함되어 있습니다.
예를 들어 원격 측정 데이터 수집이나 Azure 클라우드의 클라우드 서비스 연결과 같은 하위 수준 작업을 위한 C#, C++ 및 C 코드도 많이 찾을 수 있습니다. 여기에서도 모든 소스가 공개되어 있으며 무료로 사용할 수 있습니다. 마지막으로 Virtual Race Assistant를 구현하는 데 사용되는 하이브리드 정방향 및 역방향 연결 규칙 엔진이 있습니다. 많은 수의 사실을 사용할 때 최대한 효율적으로 수정된 RETE 알고리즘을 사용합니다.
이 플러그인은 시뮬레이터 컨트롤러 배포판의 일부입니다. 핵심 기능을 제공하는 것 외에도 자신만의 플러그인을 구축하기 위한 템플릿으로 사용될 수도 있습니다. 적은 수의 코드 라인을 사용한 매우 간단한 기능 추가부터 SimHub와 같은 외부 소프트웨어를 제어하는 매우 복잡한 거대 기업까지 다양합니다.
| 플러그인 | 설명 |
|---|---|
| 체계 | 여러 버튼 상자 레이어를 처리하고 시뮬레이션 구성에 대해 구성된 모든 응용 프로그램을 관리합니다. |
| 버튼 상자 | 자신만의 버튼 상자/컨트롤러 시각적 요소를 구축하기 위한 도구입니다. ButtonBox 의 기본 구현은 그래픽 레이아웃 편집기를 사용하여 구성할 수 있는 그리드 기반 버튼 상자 레이아웃을 구현합니다. |
| 스트림 데크 | 하나 이상의 스트림 데크를 시뮬레이터 컨트롤러에 외부 컨트롤러로 연결하기 위한 도구입니다. Stream Deck에 정보를 텍스트 및/또는 아이콘으로 동적으로 표시할 수 있는 특별한 Stream Deck 플러그인이 제공됩니다. |
| 촉각 피드백 | SimHub를 사용하여 페달 및 섀시 진동을 완전히 구성 가능한 지원합니다. |
| 모션 피드백 | SimFeedback을 사용하여 리그 모션 피드백을 완전히 구성 가능하게 지원합니다. |
| 페달 교정 | 하드웨어 컨트롤러에서 직접 고급 페달의 다양한 보정 곡선 중에서 선택할 수 있습니다. |
| 운전 코치 | 이 플러그인은 가상 운전 코치인 Aiden을 통합합니다. 이 플러그인이 활성화되어 있고 올바르게 구성되어 있으면 시뮬레이터 컨트롤러가 실행될 때 이 Assistant를 자동으로 사용할 수 있습니다. |
| 레이스 엔지니어 | 이 플러그인은 가상 레이스 엔지니어인 Jona를 ACC 플러그인과 같은 시뮬레이션 게임용 다른 모든 플러그인과 통합합니다. 플러그인은 시뮬레이션 게임과 가상 레이스 엔지니어 간의 데이터 전송을 처리합니다. |
| 인종 전략가 | 이 플러그인은 가상 레이스 전략가인 Cato를 ACC 플러그인과 같은 시뮬레이션 게임용 다른 모든 플러그인과 통합합니다. 플러그인은 시뮬레이션 게임과 가상 레이스 전략가 간의 데이터 전송을 처리합니다. |
| 레이스 스포터 | 이 플러그인은 Virtual Race Spotter인 Elisa를 ACC 플러그인과 같은 시뮬레이션 게임용 다른 모든 플러그인과 통합합니다. 플러그인은 시뮬레이션 게임과 Virtual Race Spotter 간의 데이터 전송을 처리합니다. |
| 팀 서버 | 팀 서버는 멀티플레이어 팀 레이스에서도 가상 레이스 어시스턴트 사용을 지원합니다. 이는 자동차 상태와 보조자 지식을 관리하고 이를 참여 운전자 간에 전달하는 서버사이드 솔루션을 기반으로 합니다. |
| ACC | 하드웨어 컨트롤러에서 Assetto Corsa Competizione를 시작하고 중지하기 위한 특별한 지원을 제공합니다. Assetto Corsa Competizione 이 현재 실행 중일 때 사용할 수 있는 "채팅" 모드는 구성 도구를 통해 채팅 메시지를 구성할 수 있는 멀티플레이어 게임 내 채팅 시스템에 대한 자동 채팅 메시지를 처리합니다. 또한 릴리스 2.0부터 이 플러그인은 Assetto Corsa Competizione 의 Pitstop MFD에 대한 정교한 지원을 제공합니다. 모든 설정은 "Pitstop" 모드를 사용하여 컨트롤러 하드웨어로 조정할 수 있지만, 손을 스티어링 휠에 유지하기 위해 음성 제어를 사용하여 설정을 제어하는 것도 가능합니다. 가상 레이스 엔지니어인 Jona, 가상 레이스 전략가인 Cato 및 가상 레이스 스포터인 Elisa와의 통합을 사용할 수 있습니다. "어시스턴트" 모드는 하드웨어 컨트롤러에서 대부분의 Race Assistant 명령을 처리할 수 있습니다. |
| 교류 | 가상 레이스 엔지니어인 Jona, 가상 레이스 전략가인 Cato 및 가상 레이스 감시자인 Elisa를 지원하는 Assetto Corsa 용 통합입니다. 플러그인은 또한 피트스톱 설정을 조정하기 위한 "피트스톱" 모드와 레이스 어시스턴트와 상호 작용하기 위한 "어시스턴트" 모드를 지원합니다. |
| AMS2 | 가상 레이스 엔지니어인 Jona, 가상 레이스 전략가인 Cato 및 가상 레이스 감시자인 Elisa를 지원하는 Automobilista 2 용 통합입니다. 플러그인은 또한 피트스톱 설정을 조정하기 위한 "피트스톱" 모드와 레이스 어시스턴트와 상호 작용하기 위한 "어시스턴트" 모드를 지원합니다. |
| IRC | 이 플러그인은 iRacing 시뮬레이션 게임을 시뮬레이터 컨트롤러와 통합합니다. "피트스톱" 모드를 사용하면 컨트롤러 하드웨어에서 피트스톱 설정을 제어할 수 있으며 가상 레이스 엔지니어인 Jona, 가상 레이스 전략가인 Cato 및 가상 레이스 스포터인 Elisa와의 통합도 사용할 수 있습니다. "어시스턴트" 모드는 하드웨어 컨트롤러에서 대부분의 Race Assistant 명령을 처리할 수 있습니다. |
| RF2 | ACC 및 IRC 플러그인과 유사하게 이 플러그인은 rFactor 2 에 대한 시작 및 중지 지원을 제공합니다. "피트스톱" 모드를 사용하면 컨트롤러 하드웨어에서 피트스톱 설정을 제어할 수 있으며 가상 레이스 엔지니어인 Jona 및 가상 레이스 전략가인 Cato와의 통합도 사용할 수 있습니다. "어시스턴트" 모드는 하드웨어 컨트롤러에서 대부분의 Race Assistant 명령을 처리할 수 있습니다. |
| R3E | ACC와 마찬가지로 IRC 및 RF2 플러그인은 RaceRoom Racing Experience 에 대한 이 플러그인 시작 및 중지 지원을 제공합니다. "피트스톱" 모드를 사용하면 컨트롤러 하드웨어에서 피트스톱 설정을 제어할 수 있으며 가상 레이스 엔지니어인 Jona, 가상 레이스 전략가인 Cato 및 가상 레이스 스포터인 Elisa와의 통합도 사용할 수 있습니다. "어시스턴트" 모드는 하드웨어 컨트롤러에서 대부분의 Race Assistant 명령을 처리할 수 있습니다. |
| RSP | Rennsport를 위한 간단한 통합. 하드웨어 컨트롤러에서 시작하고 중지하는 것 외에는 기능이 없습니다. |
| PCARS2 | 가상 레이스 엔지니어인 Jona, 가상 레이스 전략가인 Cato 및 가상 레이스 관측자 Elisa를 지원하는 Project CARS 2 통합. 플러그인은 또한 피트스톱 설정을 조정하기 위한 "피트스톱" 모드와 레이스 어시스턴트와 상호 작용하기 위한 "어시스턴트" 모드를 지원합니다. |
| LMU | Le Mans Ultimate 포함을 완벽하게 지원합니다. 피트스톱 자동화 및 Race Assistant 통합. Le Mans Ultimate는 동일한 엔진을 기반으로 하기 때문에 기능은 rFactor 2 플러그인의 기능과 동일합니다. |
| 완성 | 이 플러그인은 SimHub와 같은 다른 애플리케이션과의 상호 운용성을 구현합니다. |
다음 응용 프로그램은 배포판의 일부가 아니며 시뮬레이터 컨트롤러에 반드시 필요한 것은 아닙니다. 그러나 시뮬레이터 컨트롤러는 이러한 구성 요소를 인식하고 가능한 경우 더 나은 전반적인 경험을 위해 이를 통합합니다.
| 애플리케이션 | 설명 |
|---|---|
| 오토핫키 | [개발 전용] 객체 지향 스크립팅 언어입니다. 자신만의 플러그인을 개발하려면 이 플러그인이 필요합니다. |
| 비주얼 스튜디오 | [개발 전용] Windows 애플리케이션용 개발 환경입니다. 지원되는 시뮬레이션 게임의 다양한 원격 측정 인터페이스 개발에 사용됩니다. |
| NirCmd | [선택 사항] 확장된 Windows 명령 셸. 시뮬레이터 컨트롤러가 시작 중 게임 내 사운드 볼륨 설정을 제어하는 데 사용됩니다. |
| SoX | [선택사항] 오디오 처리 유틸리티. 오디오 품질과 같은 팀 라디오를 달성하기 위해 오디오 후처리를 위해 Race Assistant에서 사용됩니다. |
| 실제 머리 움직임 | [선택 사항] 이 작은 도구는 Assetto Corsa Competizione을 사용할 때 강력히 권장됩니다. 이는 자동차의 현재 움직임에 따라 수평선의 움직임을 제어하고 Assetto Corsa Competizione 의 내장 그래픽보다 머리가 튀지 않고 훨씬 더 나은 시야를 제공합니다. |
| AI트랙 | [선택 사항] 신경망을 사용하여 대시캠 비디오 스트림에서 시야각을 감지하는 깔끔하고 작은 도구입니다. 게임 내 시야각을 제어하기 위해 opentrack과 함께 사용됩니다. |
| 오픈트랙 | [선택 사항] 시뮬레이션 게임에 연결하고 freetrack 프로토콜을 사용하여 시야각을 제어합니다. 아날로그 조이스틱이나 AITrack과 같은 UDP 기반 소스 등 여러 입력 방법이 지원됩니다. |
| 심허브 | [선택 사항] 시뮬레이션 게임을 위한 다양한 용도의 소프트웨어 컬렉션입니다. 베이스 셰이커 또는 진동 모터를 사용하여 진동을 생성하고 완전히 통합 된 Arduino 개발 환경을 제공합니다. 추가 기능은 사용자 정의 대시 보드의 정의를 지원합니다. 특수 플러그인은 시뮬레이터 컨트롤러의 일부입니다. 버튼을 터치하여 진동 강도와 같은 Simhub의 촉각 피드백 옵션을 제어합니다. |
| SimFeedback | [선택 사항] 소프트웨어뿐만 아니라 모션 리그 구축을위한 완전한 DIY 프로젝트. Simfeedback은 시각적 제어 곡선을 사용하여 모션 액추에이터를 제어하여 ingame 물리 데이터를 복잡하고 매우 빠른 리그 움직임으로 변환합니다. 또한 플러그인은 Simulator Controller에 통합되어 SimFeedback을 제어하기 위해 하드웨어 컨트롤러를 사용합니다. |
| SFX-100-STREAMDECK | [선택 사항] Simfeedback 의이 확장은 효과 상태와 강도를 제어하기 위해 Simfeedback에 연결하는 데 사용됩니다. 사용하지 않으면 Simfeedback 설정의 하위 집합은 마우스 자동화로 제어됩니다. 이것은 정말 재미 있지 않기 때문에 현재 어려운 시카선에서 상대 중 한 명을 추월하려고 노력하면서 커넥터 확장을 설치하는 것이 좋습니다. 편의를 위해 Utilities 3 파티 폴더에 SFX-100-STREAMDECK 플러그인의 사본을 찾을 수 있습니다. 두 단계가 필요하므로 설치 및 구성 지침을 읽는 것을 잊지 마십시오. |
| Microsoft 음성 언어 | [선택 사항] Windows 버전과 선택한 언어에 따라 Simulator Controller, 특히 Virtual Race 엔지니어 인 Jona의 음성 생성 기능을 위해 Microsoft에서 추가 텍스트 음성 언어를 설치할 수 있습니다. |
| Microsoft 음성 인식 | [선택 사항] 또한 Windows 버전과 선택한 언어에 따라 Microsoft, 특히 가상 레이스 엔지니어 인 Jona의 추가 음성 텍스트 또는 음성 인식 언어를 설치할 수 있습니다. 편의를 위해 Utilities 3 파티 폴더에서 언어 런타임과 일부 선택한 인식자를 찾을 수 있습니다. |
| Rfactor 2 원격 측정 공급자 | [선택 사항] Rfactor 2 또는 Le Mans Ultimate Simulation Game을 실행하고 레이스 중에 가상 레이스 엔지니어 인 Jona를 사용하려면 Ractor 2 애플리케이션 디렉토리 에이 데이터 AQCUITION 플러그인을 설치해야합니다. 편의를 위해 유틸리티 3 자 폴더의 readme 파일을 포함하여 플러그인 ( RF2_SM_TOOLS_3.7.14.2.ZIP )의 사본을 찾을 수 있습니다. 동일한 게임 엔진을 기반으로하는 Le Mans Ultimate 에도 마찬가지입니다. 설치 지침을 확인하십시오. |
다음 릴리스에 나오는 새로운 기능의 경우 릴리스 노트를 살펴보십시오.
기여하고 싶나요? 엄청난!
헤드 업 : 나는 다가오는 멋진 AI 물건을위한 공동 개발자를 찾고 있습니다.
지난 몇 주 동안 일주일에 한 번의 릴리스를 발사 한 후 프로젝트는 지금부터 약간 느려집니다. 그러나 시뮬레이터 컨트롤러의 개발은 여전히 진행 중이며 장기적으로 2 주 사이클이 될 것이라고 확신합니다. 백 로그의 내 자신의 아이디어 목록은 항상 3 개 이상의 릴리스를 위해 충분히 길며 백 로그에 포함될 기능을 제안하려면 Github에서 향상된 문제를 열거나 Discord 커뮤니티에 가입하여 아이디어를 게시 할 수 있습니다. #request-a-feature 채널에서 ...
이 소프트웨어는 그대로 제공됩니다. 상업적 목적으로 사용하지 않는 한 모든 목적으로 사용하여 귀하의 요구에 맞게 수정할 수 있습니다.
(2024) Creative Commons -By -NC -SA- Oliver Juwig (Thebigo)


