Navigating Ryze Tello Drones With MATLAB App
v1.1.1
MATLAB®을 실행하는 컴퓨터에 연결된 Ryze® Tello Drone을 대화형으로 제어하기 위해 MathWorks®는 MATLAB 앱인 Ryze Tello Navigator를 제공합니다. 이 앱은 다음을 수행하는 데 도움이 됩니다.
컴퓨터의 WiFi 네트워크에 연결된 모든 Ryze Tello 드론을 확인하세요.
드론의 이착륙을 수행합니다.
키보드를 사용하거나 앱의 탐색 제어 버튼을 사용하여 드론의 탐색을 제어합니다.
카메라 피드를 미리 보고 이미지를 캡처하세요.
드론의 비디오 피드를 MATLAB 작업 공간 변수에 기록합니다.
완료된 탐색을 위한 MATLAB 스크립트를 생성합니다.
Ryze Tello Drones용 MATLAB 및 MATLAB 지원 패키지 설치
초기 설정 및 구성을 수행하고 하나 이상의 Ryze Tello Drones에 연결합니다.
이 저장소를 다운로드하거나 복제하세요.
MATLAB에서 로컬 리포지토리 폴더로 이동합니다.
MATLAB 명령 창에서 다음 명령을 실행합니다.
경로 추가(비밀번호);
저장 경로;
ryzeTelloNavigator 명령을 실행하여 앱을 시작합니다.
MATLAB 릴리스 R2022a 이상이 필요합니다.
Ryze Tello® 드론용 MATLAB® 지원 패키지
장치 목록 에 나타나는 드론이 앱을 사용하여 제어하려는 드론인지 확인하세요. 드론이 목록에 없으면 설정 및 구성을 다시 수행하세요.
| 단계 | 행동 | 결과 |
|---|---|---|
| 1 |  장치 목록 에서 드론 이름을 클릭하고 상단 탐색 섹션에서 비행 전 확인을 클릭합니다. 장치 목록 에서 드론 이름을 클릭하고 상단 탐색 섹션에서 비행 전 확인을 클릭합니다. | 새로운 대화 상자인 Running Pre-flight Checklist가 나타납니다. 비행 전 확인이 진행되는 동안 앱의 다른 모든 컨트롤은 비활성화됩니다. 오류가 있는 경우 대화 상자에는 필요한 문제 해결 단계에 대한 링크가 제공됩니다. |
| 2 | 모든 비행 전 점검이 성공적으로 완료되었는지 확인한 후 확인을 클릭합니다. |  비행 전 확인 완료 표시가 앱 오른쪽에 나타납니다. 다른 모든 컨트롤도 활성화됩니다. 비행 전 확인 완료 표시가 앱 오른쪽에 나타납니다. 다른 모든 컨트롤도 활성화됩니다. |
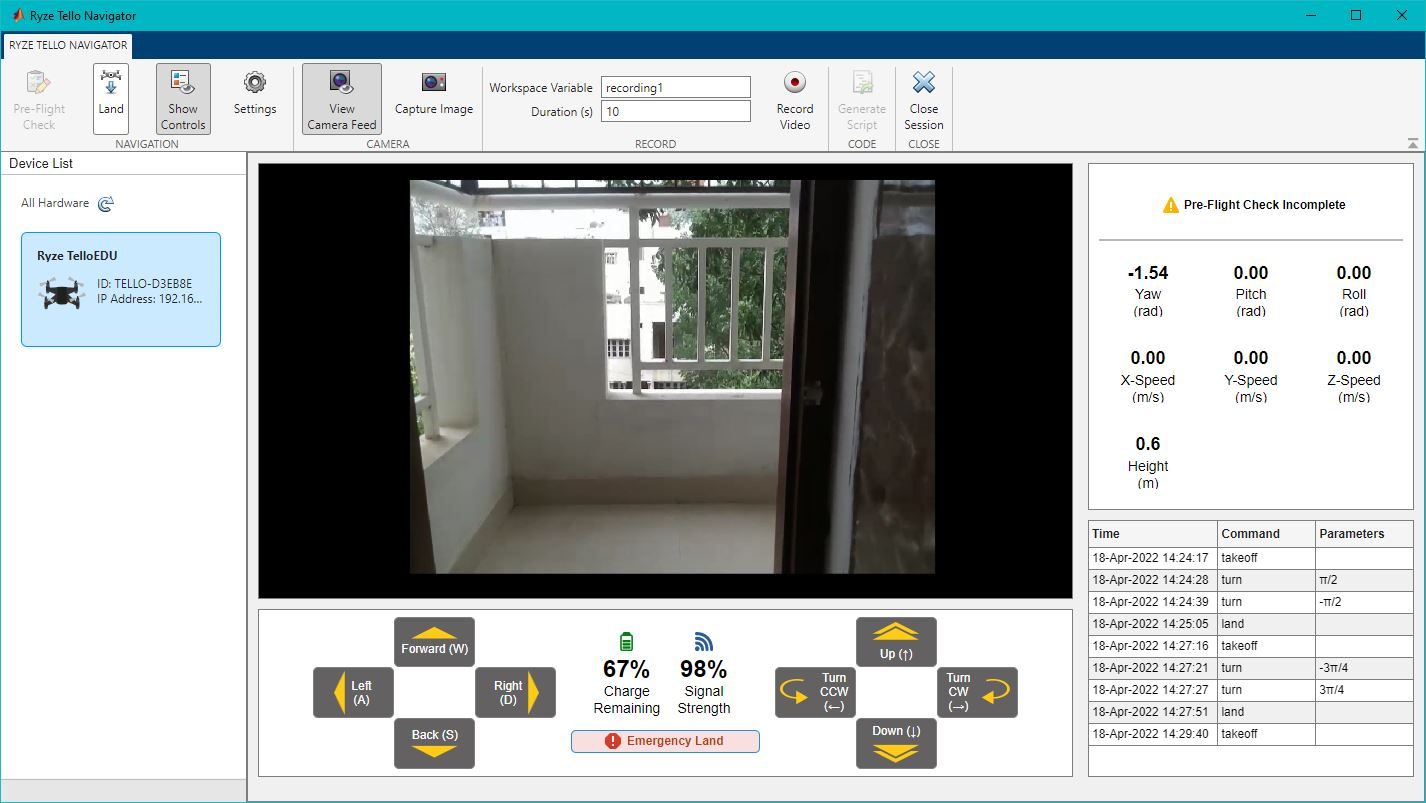
Ryze Tello Navigator는 이륙/착륙을 수행하고 Ryze Tello 드론을 대화형으로 제어하는 데 도움이 됩니다.
참고 : 드론 이륙을 시작하기 전에 일반적인 안전 예방 조치를 고려하세요. 이륙 중 또는 수동 항법 제어(다음 단계에서 언급)를 수행하는 동안 드론과 주변 환경에 발생할 수 있는 손상이 감지되면 비상 착륙을 클릭할 수 있습니다. 이 버튼을 클릭하면 드론 모터의 비상 종료가 트리거되어 드론이 현재 높이에서 땅으로 떨어지거나(Tello EDU 드론의 경우) 드론이 현재 위치에서 수직으로 착륙하게 됩니다(Tello 드론의 경우).
| 단계 | 행동 | 결과 |
|---|---|---|
| 1 |  앱에 표시된 드론의 배터리 충전량과 신호 강도가 이륙 및 제어를 수행하기에 충분한지 확인하세요. 앱에 표시된 드론의 배터리 충전량과 신호 강도가 이륙 및 제어를 수행하기에 충분한지 확인하세요. | |
| 2 |  카메라 피드 보기를 클릭하여 드론의 카메라 피드가 제대로 작동하는지 확인하세요. 카메라 피드 보기를 클릭하여 드론의 카메라 피드가 제대로 작동하는지 확인하세요. | 앱은 이륙 전 드론의 카메라에 보이는 미리보기를 표시합니다. 나중에 드론이 움직이면 카메라의 실시간 피드로 미리보기가 업데이트됩니다. |
| 3 |  키보드에서 스페이스바를 누르거나 툴스트립 영역의 탐색 섹션에 나타나는 Take Off 를 클릭합니다. 키보드에서 스페이스바를 누르거나 툴스트립 영역의 탐색 섹션에 나타나는 Take Off 를 클릭합니다. | 드론의 모터가 시동되고 드론이 특정 고도로 이륙하여 해당 위치에서 호버링합니다. 이륙 버튼이 착륙 버튼으로 대체되었습니다. |
| 4 | 앱에서 해당 아이콘을 클릭하거나 키보드를 사용하여 앱에서 드론의 수동 탐색을 수행합니다. | 드론은 사용자가 실행한 내비게이션 컨트롤에 따라 이동합니다. 활성화된 경우 카메라 피드(미리보기)도 업데이트됩니다. 앱에 표시되는 미리보기 창의 영역을 늘리려면 수동 제어를 위한 버튼이 표시되는 창을 숨길 수 있습니다. 창을 비활성화하려면 컨트롤 표시를 클릭합니다. 키보드 키를 사용하여 드론을 제어할 수 있습니다. |
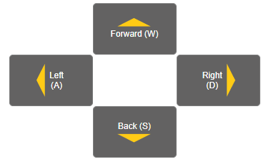
WASD 키:
W - 앞으로 나아가다
A – 왼쪽으로 이동
S - 뒤로 이동
D – 오른쪽으로 이동
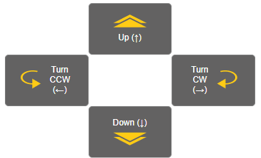
화살표 키:
▲ – 드론을 위쪽으로 이동
▼ – 드론을 아래쪽으로 이동
cra – 드론을 시계 반대 방향으로 돌립니다.
► – 드론을 시계 방향으로 돌립니다.
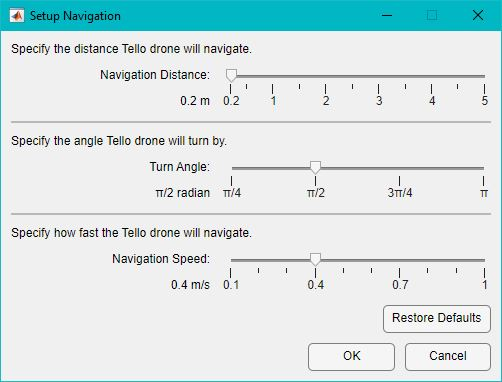
특정 방향을 따라 이동을 시작할 때마다 드론이 사용하는 탐색 설정을 변경할 수 있습니다. 설정을 클릭하여 탐색 설정 대화 상자를 열고 슬라이더를 사용하여 거리, 각도 및 속도 값을 지정합니다. 기본값(탐색 거리: 0.2m, 회전 각도: π/2, 탐색 속도: 0.4m/s)을 복원하려면 대화 상자에서 기본값 복원을 클릭합니다.

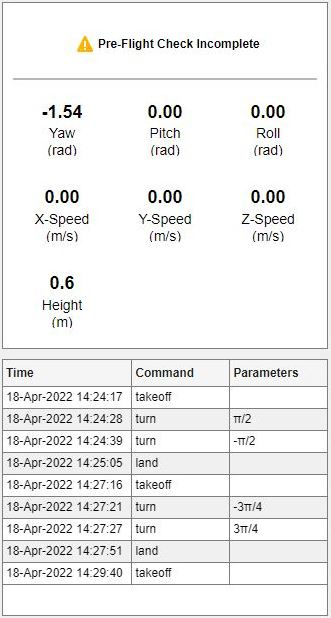
또한 이 앱은 실시간 탐색 데이터(드론의 센서로 캡처됨)와 탐색 버튼 또는 키보드 키를 사용하여 실행한 명령 로그도 표시합니다. 이 정보는 오른쪽 패널에 나타납니다.
Ryze Tello Navigator를 사용하면 Ryze Tello 드론의 FPV 카메라를 통해 보이는 이미지를 캡처하고 비디오를 녹화할 수 있습니다.
| 단계 | 행동 | 결과 |
|---|---|---|
| 1 |  한 번에 하나의 이미지를 캡처합니다. 한 번에 하나의 이미지를 캡처합니다. | 이미지는 작업 공간 변수로 저장됩니다. |
| 2 | 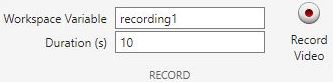 비디오를 녹화할 작업 공간 변수와 기간을 정의한 다음 비디오 녹화를 클릭합니다. 비디오를 녹화할 작업 공간 변수와 기간을 정의한 다음 비디오 녹화를 클릭합니다. | 드론 카메라의 영상이 지정된 시간 동안 녹화되기 시작합니다. 녹화 중 언제든지 녹화를 중지하려면 중지를 클릭하세요. 그러면 비디오가 자동으로 작업 공간에 이미지 배열로 저장됩니다. |
Ryze Tello Navigator는 수행한 탐색의 라이브 편집기 스크립트를 생성하는 데 도움이 됩니다. 이 스크립트를 사용하여 드론의 초기 설정 및 비행 경로를 정의한 다음 추가 워크플로우를 수행하기 위한 사용자 정의 알고리즘을 추가할 수 있습니다.

이렇게 하려면 드론을 성공적으로 착륙시킨 후 스크립트 생성을 클릭하세요.
| 경고 | 문제 및 권장 조치 |
|---|---|
| 배터리 부족 | 남은 충전량 표시에 20% 미만의 값이 표시되고 드론이 비행하거나 호버링하는 경우 앱에서 경고를 표시하기 시작합니다. 배터리 잔량이 10% 미만으로 떨어지면 드론은 현재 위치에서 자동으로 착륙합니다. 이를 방지하려면 앱의 착륙 버튼을 사용하여 드론을 착륙시킨 다음 드론의 배터리를 교체하십시오. |
| 낮은 신호 강도 | 드론이 비행하는 동안 앱은 신호 강도 값을 지속적으로 표시합니다. 드론 제어력을 잃지 않도록 신호 강도가 20% 미만인 경우 필요한 조치를 취하는 것이 좋습니다. 드론과의 연결이 끊어지면 드론과 다시 연결하는 옵션을 보여주는 대화 상자가 나타납니다. 그래도 실패하면 오류 메시지가 표시됩니다. |
에 대한 라이센스는 이 GitHub 저장소의 LICENSE.TXT 파일에서 사용할 수 있습니다.
MATLAB 센트럴
저작권 2022 MathWorks, Inc.


