ROScribe
v0.0.4
LLM을 사용하여 ROS 패키지를 만듭니다.
로봇 프로젝트를 설명하기 위해 자연 언어 인터페이스를 사용하여 Roscribe는 초보자에게 ROS를 사용하는 기술 장벽을 제거하고 숙련 된 엔지니어의 시간과 번거 로움을 절약합니다. Roscribe는 LLMS (Large Language Models)의 깎아 지른 힘과 유연성을 즉각적인 튜닝 기술과 결합하여 로봇 디자인의 세부 사항을 캡처하고 프로젝트를위한 전체 ROS 패키지를 자동으로 생성합니다.
Roscribe는 에이전트 다중 단계 접근 방식을 통해 전체 ROS 작업 공간을 구축합니다. 여기서 각 단계는 로봇 소프트웨어 설계의 특정 측면에 중점을 둡니다. 특히 Roscribe는 다음 단계를 도와줍니다.
ROS를 처음 사용한다면 Roscribe는 로봇 (ICS) 멘토가 될 것입니다? ️
노련한 ROS 사용자라면 Roscribe는 ROS 패키지에 대한 청사진을 만드는 데 도움이 될 수 있습니까?
Roscribe는 4 명의 에이전트로 구성됩니다. 아래 목록은 상호 작용 순서대로 표시된 각 에이전트의 책임을 자세히 설명합니다.
SpecAgent : 프로젝트의 전체 골격을 도와줍니다. ROS 용어로는 프로젝트의 ROS 그래프를 작성합니다. 여기서 그래프의 각 부분은 AI 생성 또는 오픈 소스 재조술에서 가져올 수 있습니다.GenAgent : ROS 그래프가 주어지면이 에이전트는 Python의 각 ROS 노드에 대한 ROS 작업 공간과 코드를 생성합니다. 또는 ROS 노드에 대한 오픈 소스 구현을 다운로드 할 수 있습니다.PackAgent : 생성 된 ROS 작업 공간에 대한 지식을 바탕 으로이 에이전트는 ROS 노드를 불러 일으키는 ROS 런치 파일을 만듭니다. 또한, package.xml , CMakeLists.txt 및 README.md 파일은이 에이전트에서 생성됩니다.SupportAgent : 이것은 고객 지원 에이전트로 프로젝트를 실행하는 동안 오류가 발생할 때마다 도움이 될 수 있습니다. 에이전트는 이미 프로젝트의 레이아웃에 액세스 할 수 있으며 내부적으로 생성 된 파일을 읽을 수 있습니다. 다음 그림은 Roscribe의 건축을 보여줍니다. 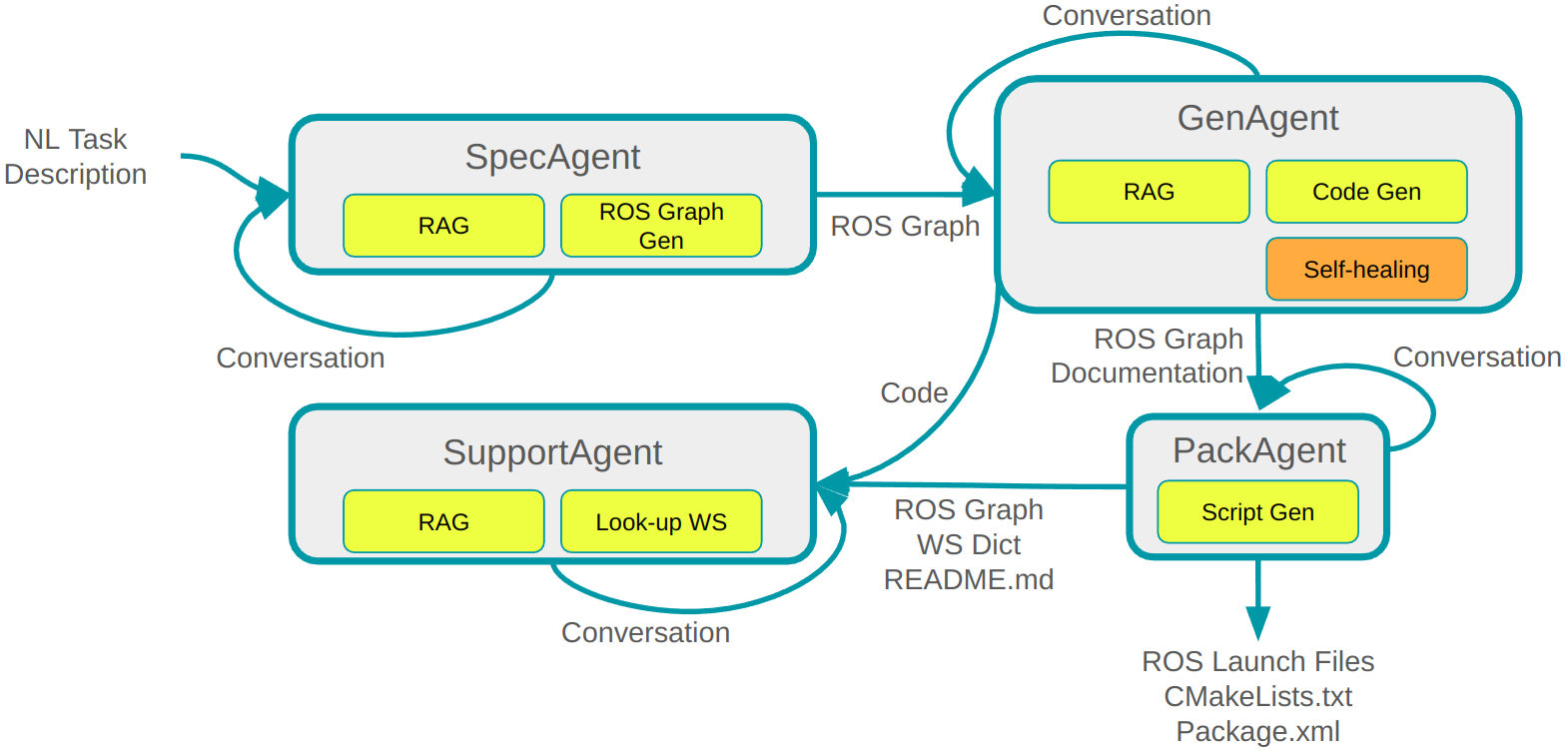
로봇 공학 프로젝트에서 Roscribe를 설치하고 사용하는 방법을 배우려면 Wiki 페이지를 참조하십시오.
Roscribe 내부와 LLM 기반 로봇 플랫폼의 아이디어
UCSD ROS 워크숍의 프레젠테이션 슬라이드 2023 년 10 월 27 일
UCSD ROS 워크숍 프레젠테이션 비디오 녹음 2023 년 10 월 27 일
컨설팅 또는 계약 작업과 같은 비즈니스 문의는 [email protected]으로 문의하십시오.
오픈 소스 프로젝트로서, 우리는 모든 로봇 공학 애호가들이 Roscribe에 기여하도록 권장합니다. 각 릴리스 중에는 새로운 기고자 목록을 발표합니다.


