Navigating Ryze Tello Drones With MATLAB App
v1.1.1
เพื่อควบคุม Ryze® Tello Drone ที่เชื่อมต่อกับคอมพิวเตอร์ของคุณที่ใช้ MATLAB® แบบโต้ตอบ MathWorks® ได้จัดเตรียมแอป MATLAB - Ryze Tello Navigator แอพนี้ช่วยให้คุณ:
ดูโดรน Ryze Tello ทั้งหมดที่เชื่อมต่อกับเครือข่าย WiFi ของคอมพิวเตอร์
ทำการบินขึ้น/ลงจอดของโดรน
ควบคุมการนำทางของโดรนโดยใช้แป้นพิมพ์หรือโดยใช้ปุ่มควบคุมการนำทางในแอป
ดูตัวอย่างฟีดกล้องและจับภาพ
บันทึกฟีดวิดีโอของโดรนลงในตัวแปรพื้นที่ทำงาน MATLAB
สร้างสคริปต์ MATLAB สำหรับการนำทางที่เสร็จสมบูรณ์
ติดตั้งแพ็คเกจสนับสนุน MATLAB และ MATLAB สำหรับโดรน Ryze Tello
ดำเนินการตั้งค่าและกำหนดค่าเริ่มต้น และเชื่อมต่อกับ Ryze Tello Drones อย่างน้อยหนึ่งเครื่อง
ดาวน์โหลดหรือโคลนพื้นที่เก็บข้อมูลนี้
นำทางไปยังโฟลเดอร์ที่เก็บในเครื่องใน MATLAB
ดำเนินการคำสั่งต่อไปนี้ในหน้าต่างคำสั่ง MATLAB:
เพิ่มเส้นทาง(pwd);
บันทึกเส้นทาง;
เปิดแอปโดยดำเนินการคำสั่ง ryzeTelloNavigator
ต้องใช้ MATLAB รุ่น R2022a หรือใหม่กว่า
แพ็คเกจสนับสนุน MATLAB® สำหรับโดรน Ryze Tello®
ตรวจสอบให้แน่ใจว่าโดรนที่ปรากฏใน รายการอุปกรณ์ เป็นโดรนที่คุณต้องการควบคุมโดยใช้แอพ หากไม่มีโดรนอยู่ในรายการ ให้ดำเนินการตั้งค่าและกำหนดค่าอีกครั้ง
| ขั้นตอน | การกระทำ | ผลลัพธ์ |
|---|---|---|
| 1 |  คลิกชื่อโดรนจาก รายการอุปกรณ์ และคลิก ตรวจสอบก่อนการบิน ในส่วนการนำทางด้านบน คลิกชื่อโดรนจาก รายการอุปกรณ์ และคลิก ตรวจสอบก่อนการบิน ในส่วนการนำทางด้านบน | กล่องโต้ตอบใหม่ การเรียกใช้รายการตรวจสอบก่อนการบิน จะปรากฏขึ้น การควบคุมอื่นๆ ทั้งหมดในแอปจะถูกปิดใช้งานในขณะที่กำลังดำเนินการตรวจสอบก่อนการบิน หากมีข้อผิดพลาด กล่องโต้ตอบจะมีลิงก์ไปยังขั้นตอนการแก้ไขปัญหาที่จำเป็น |
| 2 | หลังจากตรวจสอบแล้วว่าการตรวจสอบก่อนการบินทั้งหมดเสร็จสมบูรณ์แล้ว ให้คลิกตกลง |  สัญญาณบ่งชี้ ว่าการตรวจสอบก่อนการบินเสร็จสมบูรณ์ จะปรากฏที่ด้านขวาของแอพ การควบคุมอื่นๆ ทั้งหมดก็เปิดใช้งานเช่นกัน สัญญาณบ่งชี้ ว่าการตรวจสอบก่อนการบินเสร็จสมบูรณ์ จะปรากฏที่ด้านขวาของแอพ การควบคุมอื่นๆ ทั้งหมดก็เปิดใช้งานเช่นกัน |
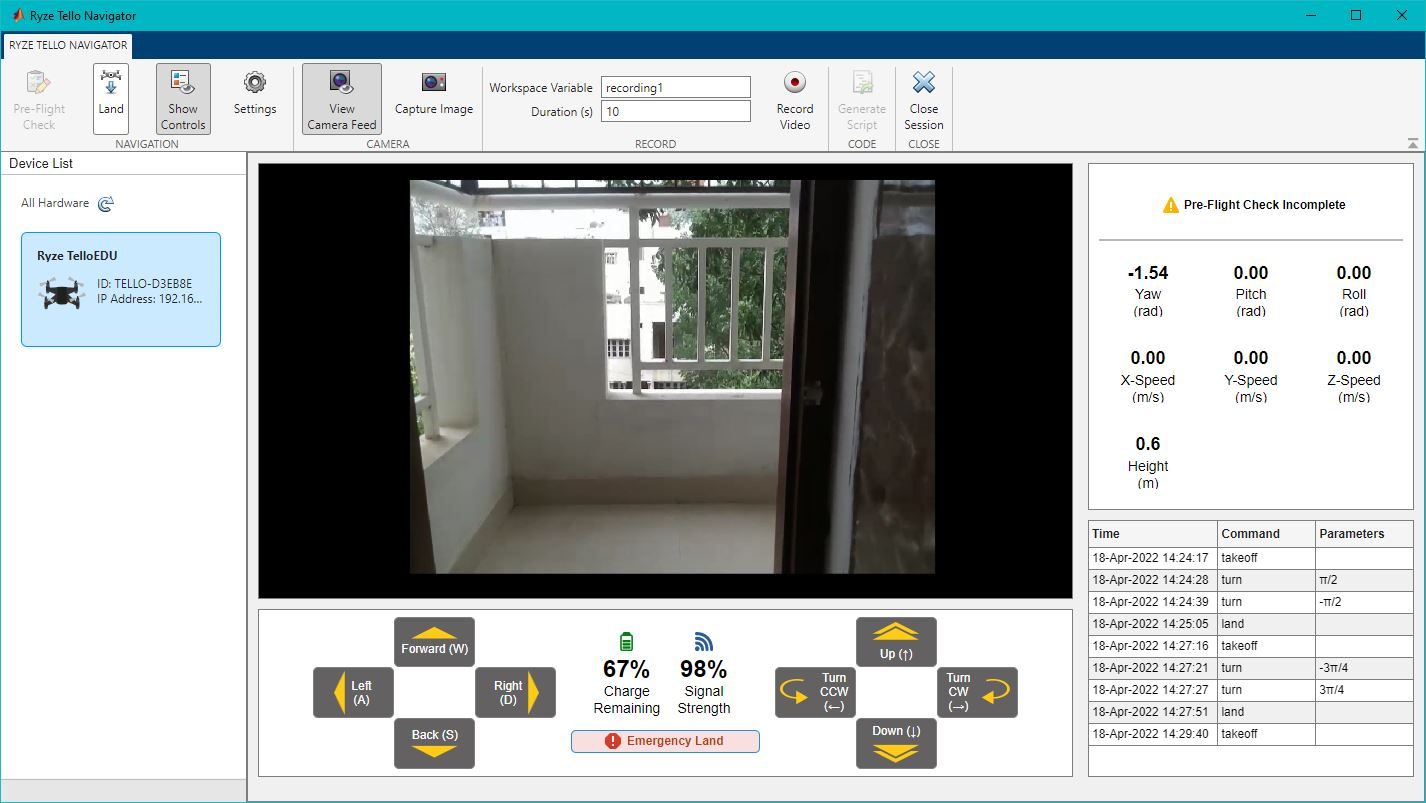
Ryze Tello Navigator ช่วยให้คุณทำการบินขึ้น/ลงจอด และควบคุมโดรน Ryze Tello แบบโต้ตอบได้
หมายเหตุ : ก่อนที่จะเริ่มการบินขึ้นของโดรน ควรคำนึงถึงข้อควรระวังด้านความปลอดภัยทั่วไปก่อน หากคุณสัมผัสได้ถึงความเสียหายใดๆ ที่อาจเกิดขึ้นกับโดรนและบริเวณโดยรอบระหว่างการบินขึ้นหรือขณะดำเนินการควบคุมการนำทางด้วยตนเอง (ตามที่กล่าวไว้ในขั้นตอนต่อๆ ไป) คุณสามารถคลิก การลงจอดฉุกเฉิน การคลิกปุ่มนี้จะเป็นการปิดระบบฉุกเฉินของมอเตอร์ของโดรน ส่งผลให้โดรนตกลงสู่พื้นจากความสูงในปัจจุบัน (สำหรับโดรน Tello EDU) หรือบังคับให้โดรนลงจอดในแนวตั้งจากตำแหน่งปัจจุบัน (สำหรับโดรน Tello)
| ขั้นตอน | การกระทำ | ผลลัพธ์ |
|---|---|---|
| 1 |  ตรวจสอบว่าประจุแบตเตอรี่และความแรงของสัญญาณของโดรนดังที่แสดงในแอป เพียงพอที่จะทำการบินขึ้นและควบคุมได้ ตรวจสอบว่าประจุแบตเตอรี่และความแรงของสัญญาณของโดรนดังที่แสดงในแอป เพียงพอที่จะทำการบินขึ้นและควบคุมได้ | |
| 2 |  คลิกดูฟีดกล้องเพื่อตรวจสอบว่าฟีดกล้องจากโดรนทำงานอย่างถูกต้อง คลิกดูฟีดกล้องเพื่อตรวจสอบว่าฟีดกล้องจากโดรนทำงานอย่างถูกต้อง | แอปจะแสดงตัวอย่างตามที่กล้องของโดรนเห็นก่อนบินขึ้น ต่อมาเมื่อโดรนเคลื่อนที่ ภาพตัวอย่างจะถูกอัพเดตด้วยฟีดข้อมูลสดจากกล้อง |
| 3 |  กด Spacebar บนแป้นพิมพ์ของคุณหรือคลิก Take Off ที่ปรากฏในส่วนการนำทางในพื้นที่แถบเครื่องมือ กด Spacebar บนแป้นพิมพ์ของคุณหรือคลิก Take Off ที่ปรากฏในส่วนการนำทางในพื้นที่แถบเครื่องมือ | มอเตอร์ของโดรนจะเริ่มทำงาน และโดรนจะบินขึ้นสู่ระดับความสูงที่กำหนดและลอยอยู่ที่ตำแหน่งนั้น ปุ่ม Take Off จะถูกแทนที่ด้วยปุ่ม Land |
| 4 | ดำเนินการนำทางโดรนด้วยตนเองจากแอพโดยคลิกที่ไอคอนที่เกี่ยวข้องในแอพหรือใช้แป้นพิมพ์ของคุณ | โดรนจะเคลื่อนที่ตามการควบคุมการนำทางที่คุณเรียกใช้ ฟีดกล้อง (ตัวอย่าง) หากเปิดใช้งานอยู่ จะได้รับการอัปเดตด้วย หากต้องการเพิ่มพื้นที่ของหน้าต่างแสดงตัวอย่างตามที่เห็นในแอป คุณสามารถซ่อนบานหน้าต่างที่แสดงปุ่มสำหรับการควบคุมด้วยตนเองได้ คลิก แสดงการควบคุม เพื่อปิดใช้งานบานหน้าต่าง คุณยังคงสามารถใช้แป้นคีย์บอร์ดเพื่อควบคุมโดรนได้ |
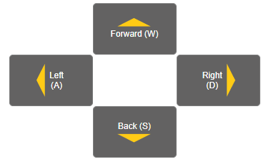
ปุ่ม WASD:
W – ก้าวไปข้างหน้า
เอ – เลื่อนไปทางซ้าย
S – เคลื่อนที่ไปข้างหลัง
D – เลื่อนไปทางขวา
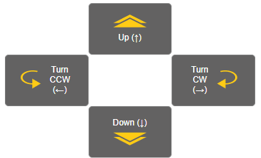
ปุ่มลูกศร:
▲ – เคลื่อนโดรนขึ้นไป
▼ – เลื่อนโดรนลง
◄ – หมุนโดรนทวนเข็มนาฬิกา
► – หมุนโดรนตามเข็มนาฬิกา
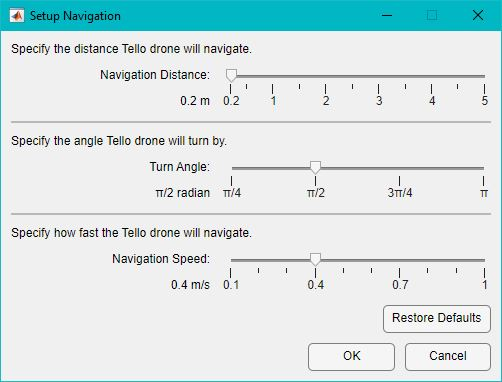
คุณสามารถเปลี่ยนการตั้งค่าการนำทางที่โดรนใช้แต่ละครั้งที่คุณกระตุ้นการเคลื่อนไหวตามทิศทางใดทิศทางหนึ่ง คลิก การตั้งค่า เพื่อเปิดกล่องโต้ตอบการตั้งค่าการนำทาง และระบุค่าระยะทาง มุม และความเร็วโดยใช้แถบเลื่อน หากคุณต้องการคืนค่าเริ่มต้น (ระยะการนำทาง: 0.2 ม. มุมเลี้ยว: π/2 ความเร็วการนำทาง: 0.4 ม./วินาที) ให้คลิก คืนค่าเริ่มต้น ในกล่องโต้ตอบ

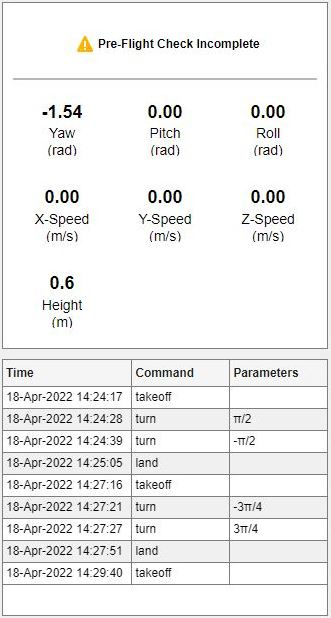
แอพนี้ยังแสดงข้อมูลการนำทางแบบสด (ตามที่เซ็นเซอร์ของโดรนบันทึกไว้) และบันทึกคำสั่งที่คุณเรียกใช้โดยใช้ปุ่มนำทางหรือแป้นคีย์บอร์ด ข้อมูลนี้ปรากฏบนแผงด้านขวา
Ryze Tello Navigator ช่วยให้คุณถ่ายภาพและบันทึกวิดีโอเท่าที่เห็นผ่านกล้อง FPV ของโดรน Ryze Tello
| ขั้นตอน | การกระทำ | ผลลัพธ์ |
|---|---|---|
| 1 |  จับภาพครั้งละหนึ่งภาพ จับภาพครั้งละหนึ่งภาพ | รูปภาพถูกจัดเก็บเป็นตัวแปรพื้นที่ทำงาน |
| 2 |  กำหนดตัวแปรพื้นที่ทำงานและระยะเวลาในการบันทึกวิดีโอ จากนั้นคลิกบันทึกวิดีโอ กำหนดตัวแปรพื้นที่ทำงานและระยะเวลาในการบันทึกวิดีโอ จากนั้นคลิกบันทึกวิดีโอ | วิดีโอจากกล้องของโดรนเริ่มได้รับการบันทึกตามระยะเวลาที่กำหนด คลิกหยุดเพื่อหยุดการบันทึกเมื่อใดก็ได้ระหว่างการบันทึก จากนั้นวิดีโอจะถูกบันทึกโดยอัตโนมัติในพื้นที่ทำงานเป็นอาร์เรย์รูปภาพ |
Ryze Tello Navigator ช่วยให้คุณสร้างสคริปต์ Live Editor ของการนำทางที่คุณดำเนินการ คุณสามารถใช้สคริปต์นี้เพื่อกำหนดการตั้งค่าเริ่มต้นและเส้นทางการบินของโดรน จากนั้นเพิ่มอัลกอริธึมที่กำหนดเองสำหรับการดำเนินการเวิร์กโฟลว์เพิ่มเติม

ในการดำเนินการนี้ ให้คลิก สร้างสคริปต์ หลังจากที่คุณลงจอดโดรนได้สำเร็จ
| คำเตือน | ปัญหาและการดำเนินการที่แนะนำ |
|---|---|
| ระดับแบตเตอรี่ต่ำ | แอปจะเริ่มแสดงคำเตือนหากตัวบ่งชี้ การชาร์จที่เหลืออยู่ แสดงค่าต่ำกว่า 20% และโดรนกำลังบินหรือโฉบอยู่ หากระดับแบตเตอรี่ลดลงต่ำกว่า 10% โดรนจะลงจากตำแหน่งปัจจุบันโดยอัตโนมัติ เพื่อหลีกเลี่ยงปัญหานี้ ตรวจสอบให้แน่ใจว่าคุณลงจอดโดรนโดยใช้ปุ่มลงจอดในแอพ จากนั้นจึงเปลี่ยนแบตเตอรี่ของโดรน |
| ความแรงของสัญญาณต่ำ | แอปจะแสดงค่า ความแรงของสัญญาณ อย่างต่อเนื่องในขณะที่โดรนกำลังบิน ขอแนะนำให้คุณดำเนินการที่จำเป็นหากความแรงของสัญญาณต่ำกว่า 20% เพื่อหลีกเลี่ยงการสูญเสียการควบคุมโดรน หากการเชื่อมต่อกับโดรนขาดหายไป กล่องโต้ตอบจะปรากฏขึ้นเพื่อแสดงตัวเลือกในการเชื่อมต่อกับโดรนอีกครั้ง หากยังคงล้มเหลว ข้อความแสดงข้อผิดพลาดจะปรากฏขึ้น |
ใบอนุญาตสำหรับมีอยู่ในไฟล์ LICENSE.TXT ในพื้นที่เก็บข้อมูล GitHub นี้
MATLAB เซ็นทรัล
ลิขสิทธิ์ 2022 MathWorks, Inc.


