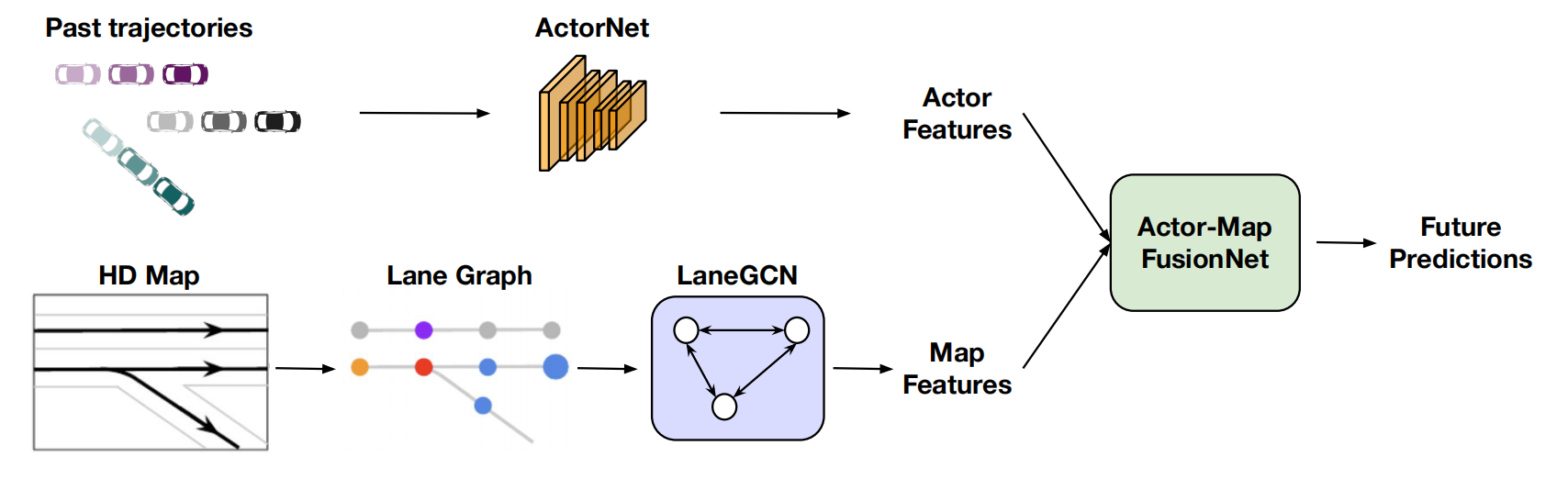
LaneGCN
1.0.0
คำเตือน
บัคเก็ต argoai-argoverse ของ Amazon AWS S3 ซึ่งมีไฟล์สาธิตจำนวนมากถูกโจมตี ไฟล์อาจเสียหาย
ไฟล์ที่อ้างอิงถึงบัคเก็ต S3 นี้ได้รับการแก้ไขแล้ว และการดึงข้อมูลใดๆ จากบัคเก็ตนี้จะถูกใส่ความคิดเห็นไว้ โปรดดำเนินการด้วยความระมัดระวัง
กระดาษ | สไลด์ | หน้าโครงการ | วิดีโอ ปากเปล่า ECCV 2020
หมิงเหลียง, ปินหยาง, รุยหู, หยุนเฉิน, เหรินจี้ เหลียว, ซ่งเฟิง, ราเควล อูร์ทาซัน
อันดับ 1 ในการแข่งขัน Argoverse Motion Forecasting
คุณต้องติดตั้งแพ็คเกจต่อไปนี้เพื่อรันโค้ด:
conda create --name lanegcn python=3.7
conda activate lanegcn
conda install pytorch==1.5.1 torchvision cudatoolkit=10.2 -c pytorch # pytorch=1.5.1 when the code is release
# install argoverse api
pip install git+https://github.com/argoai/argoverse-api.git
# install others dependancy
pip install scikit-image IPython tqdm ipdbmpi4py สำหรับการฝึกอบรมแบบกระจาย Horovod มีประสิทธิภาพมากกว่า nn.DataParallel สำหรับการฝึกอบรม mulit-gpu และใช้งานง่ายกว่า nn.DistributedDataParallel ก่อนที่จะติดตั้ง horovod ตรวจสอบให้แน่ใจว่าคุณได้ติดตั้ง openmpi แล้ว ( sudo apt-get install -y openmpi-bin ) pip install mpi4py
# install horovod with GPU support, this may take a while
HOROVOD_GPU_OPERATIONS=NCCL pip install horovod==0.19.4
# if you have only SINGLE GPU, install for code-compatibility
pip install horovodหากคุณมีปัญหาใดๆ เกี่ยวกับ horovod โปรดดูที่ horovod github
คุณสามารถตรวจสอบสคริปต์และดาวน์โหลดข้อมูลที่ประมวลผลได้ แทนที่จะต้องใช้งานเป็นเวลาหลายชั่วโมง
bash get_data.sh # single node with 4 gpus
horovodrun -np 4 -H localhost:4 python /path/to/train.py -m lanegcn
# 2 nodes, each with 4 gpus
horovodrun -np 8 -H serverA:4,serverB:4 python /path/to/train.py -m lanegcnใช้เวลา 8 ชั่วโมงในการฝึกโมเดลใน 4 GPUS (RTX 5000) ด้วย horovod
เรายังจัดเตรียมบันทึกการฝึกอบรมเพื่อให้คุณแก้ไขจุดบกพร่องอีกด้วย
python train.py -m lanegcnคุณสามารถดาวน์โหลดโมเดลที่ฝึกไว้ล่วงหน้าได้จากที่นี่
python test.py -m lanegcn --weight=/absolute/path/to/36.000.ckpt --split=test
python test.py -m lanegcn --weight=36.000.ckpt --split=val
ผลลัพธ์เชิงคุณภาพ
ป้ายกำกับ (สีแดง) การทำนาย (สีเขียว) ตัวแทนอื่น ๆ (สีน้ำเงิน)
ผลลัพธ์เชิงปริมาณ 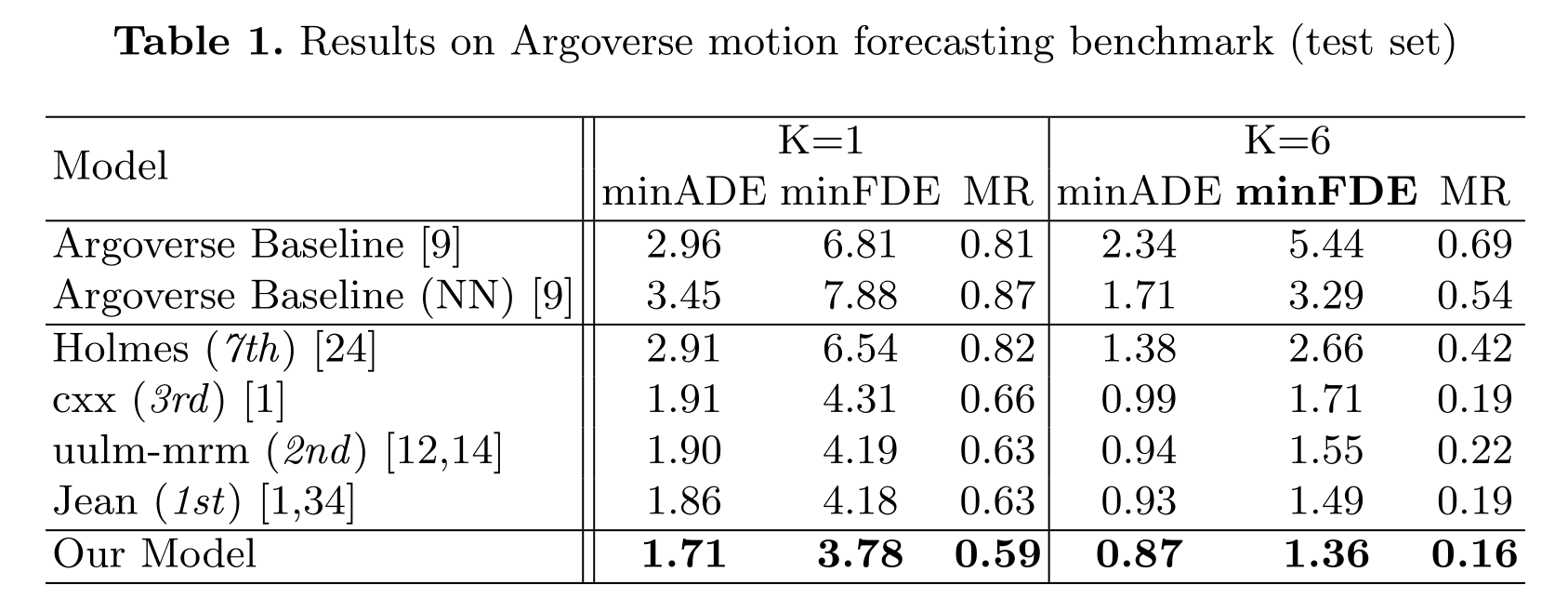
ตรวจสอบใบอนุญาต
หากคุณใช้ซอร์สโค้ดของเรา โปรดพิจารณาอ้างอิงสิ่งต่อไปนี้:
@InProceedings { liang2020learning ,
title = { Learning lane graph representations for motion forecasting } ,
author = { Liang, Ming and Yang, Bin and Hu, Rui and Chen, Yun and Liao, Renjie and Feng, Song and Urtasun, Raquel } ,
booktitle = { ECCV } ,
year = { 2020 }
}หากคุณมีคำถามใดๆ เกี่ยวกับโค้ด โปรดเปิดปัญหาและ @chenyuntc


