Car Simulator
1.0.0
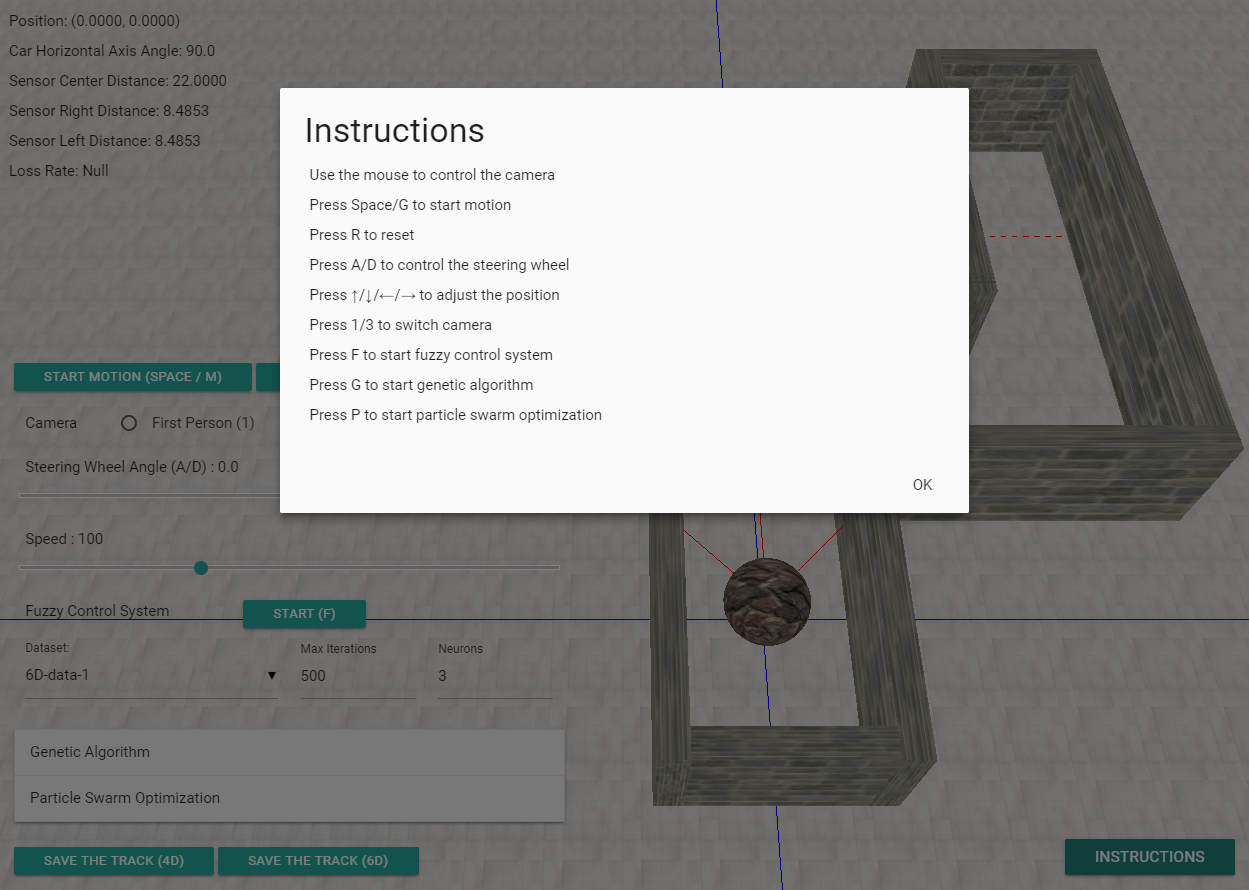
Car Simulator ใช้ระบบควบคุมแบบคลุมเครือ อัลกอริธึมทางพันธุกรรม และการเพิ่มประสิทธิภาพฝูงอนุภาคเพื่อจำลองการเคลื่อนที่ของ รถยนต์ขับเคลื่อนอัตโนมัติ บนแผนที่ นอกจากนี้ยังรองรับอุปกรณ์ VR ดูรายละเอียดที่นี่
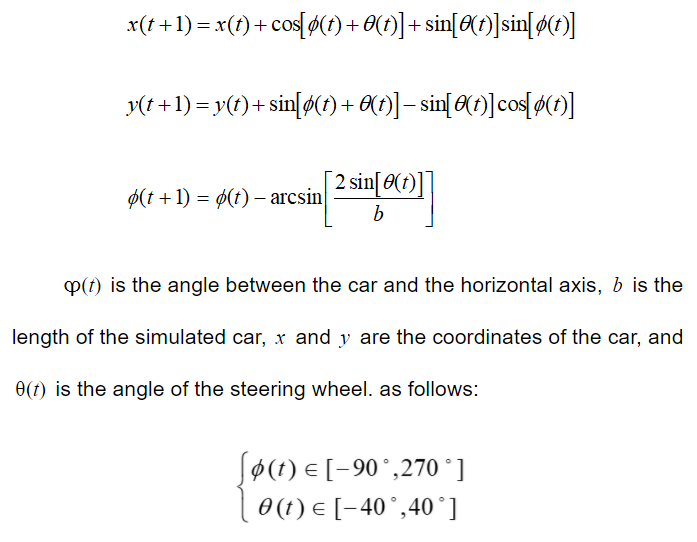
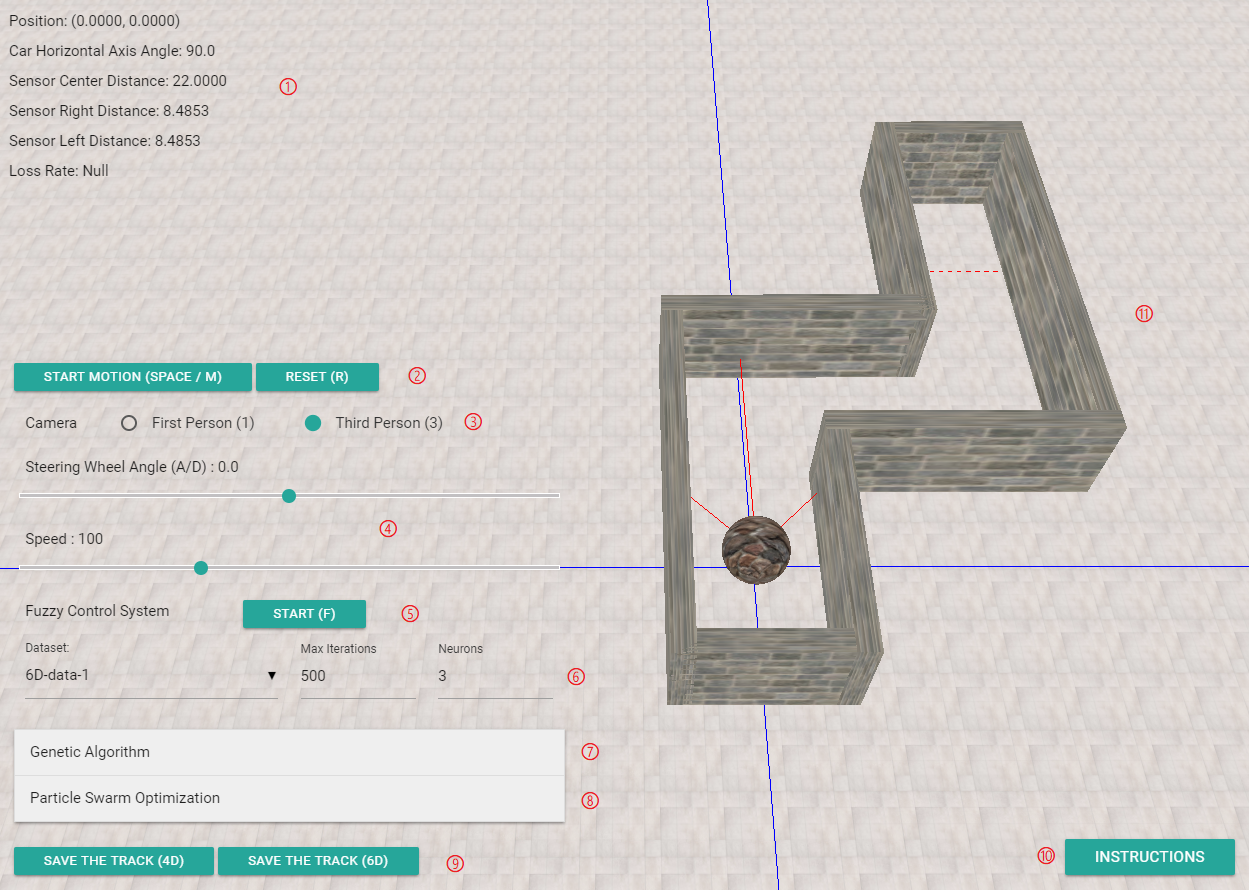
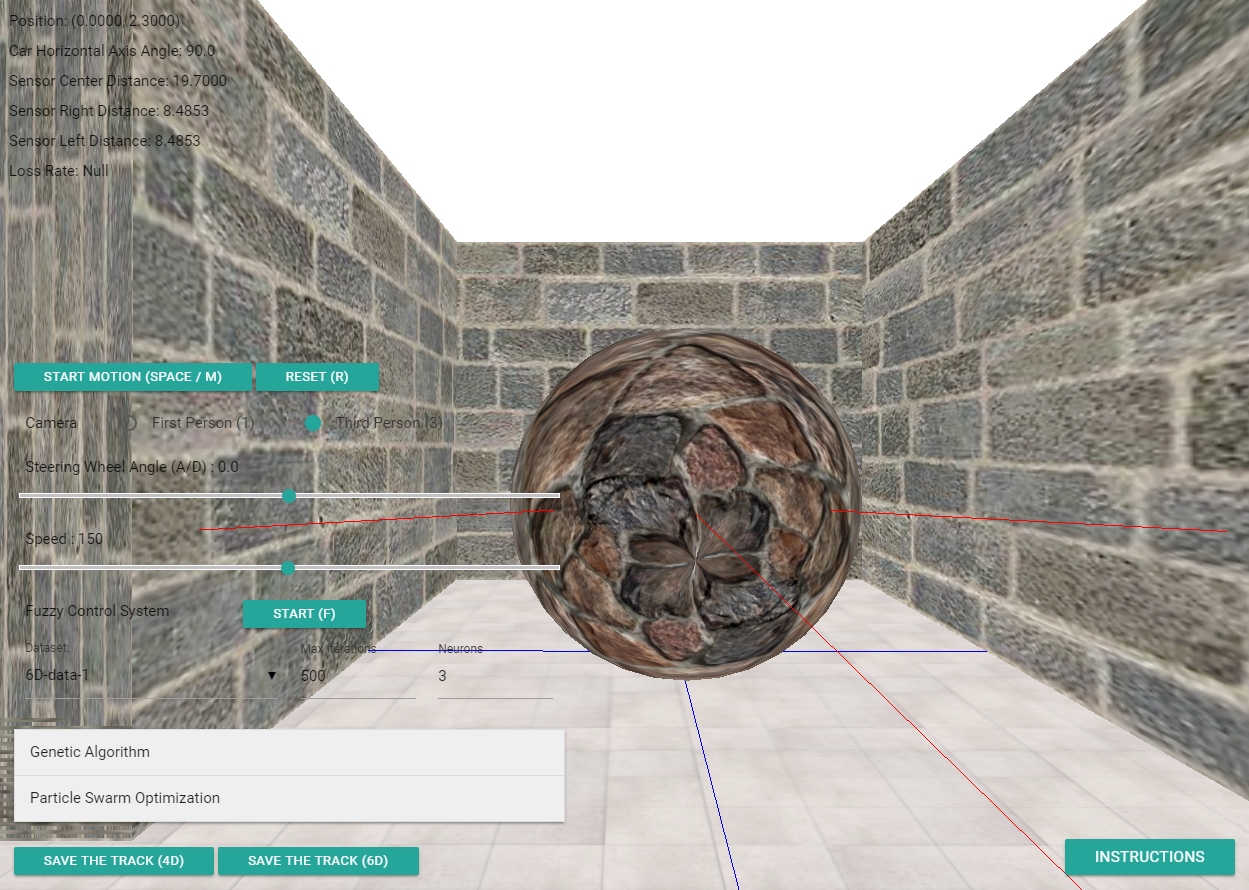
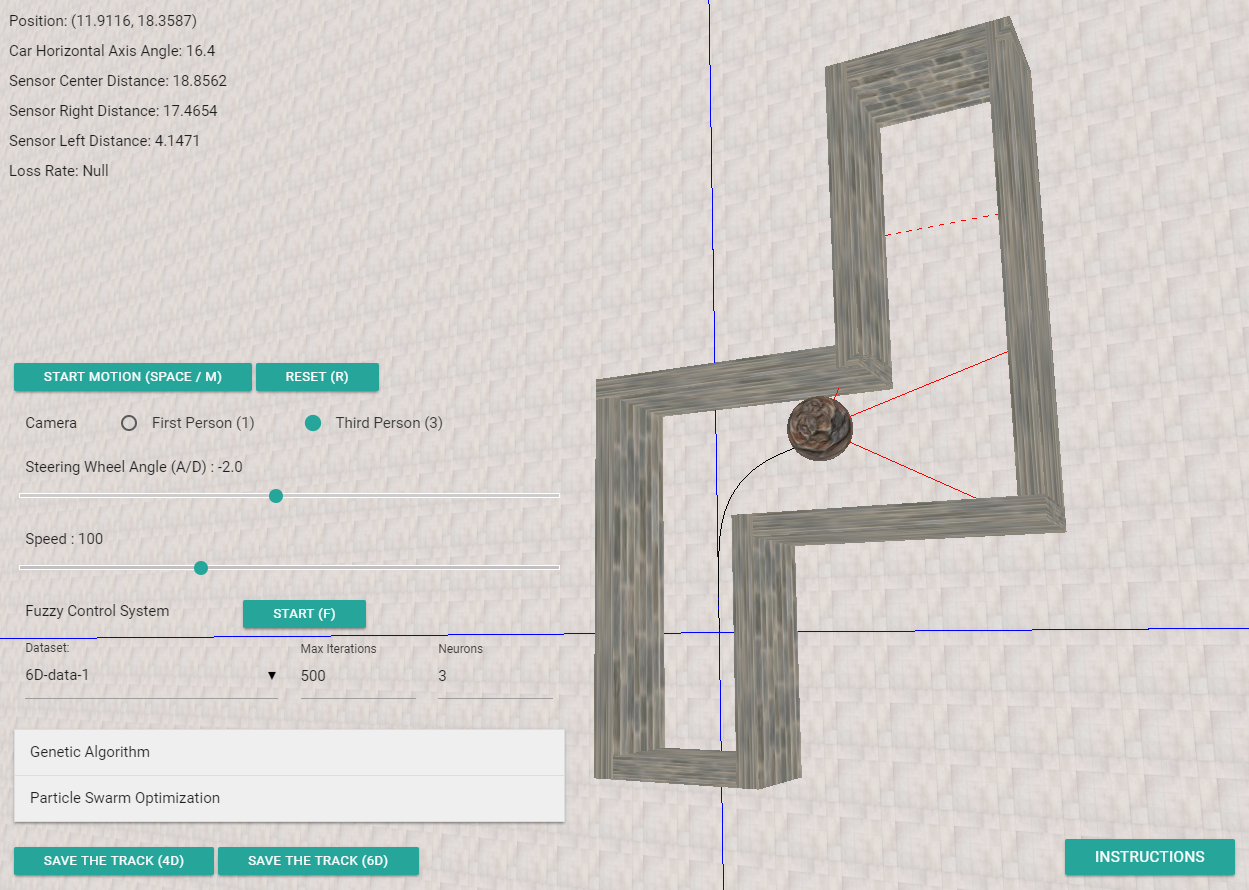
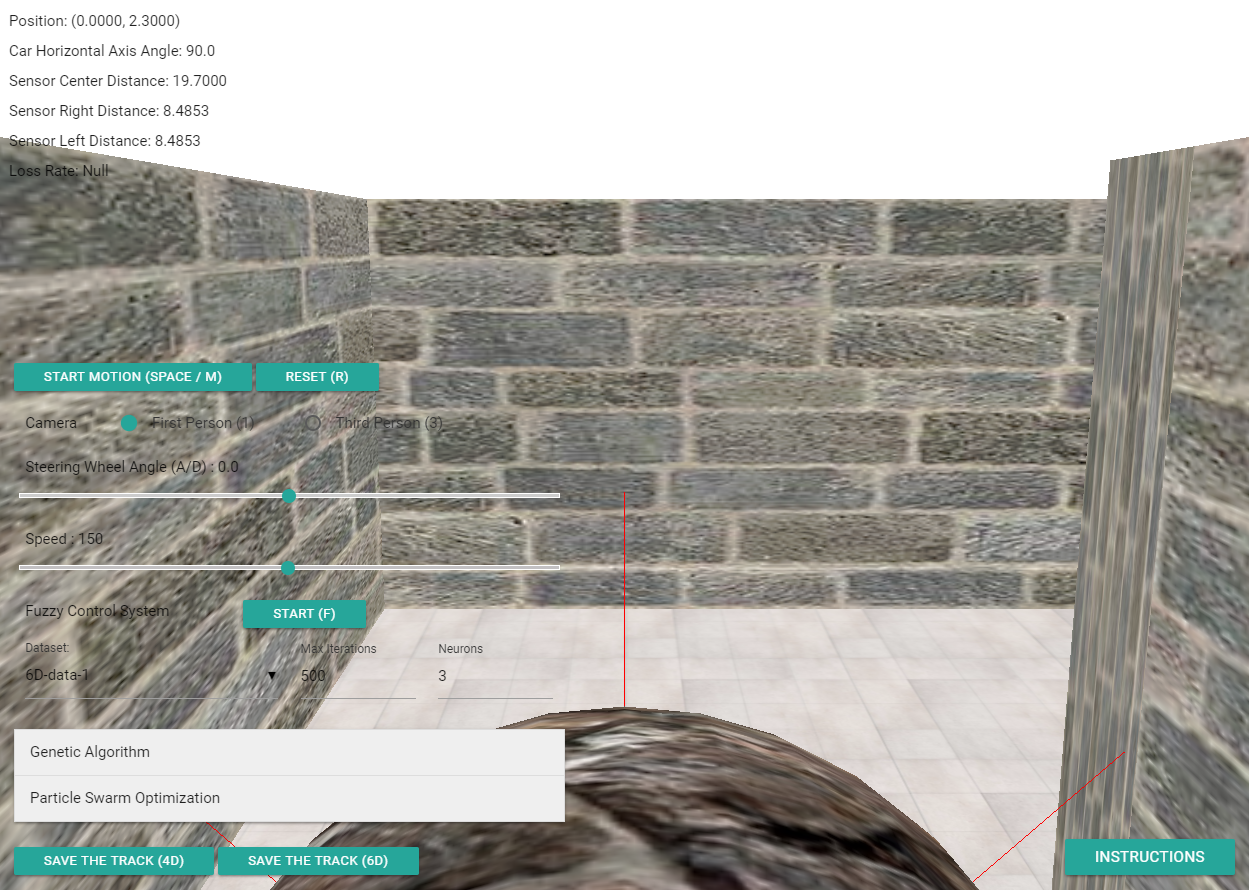
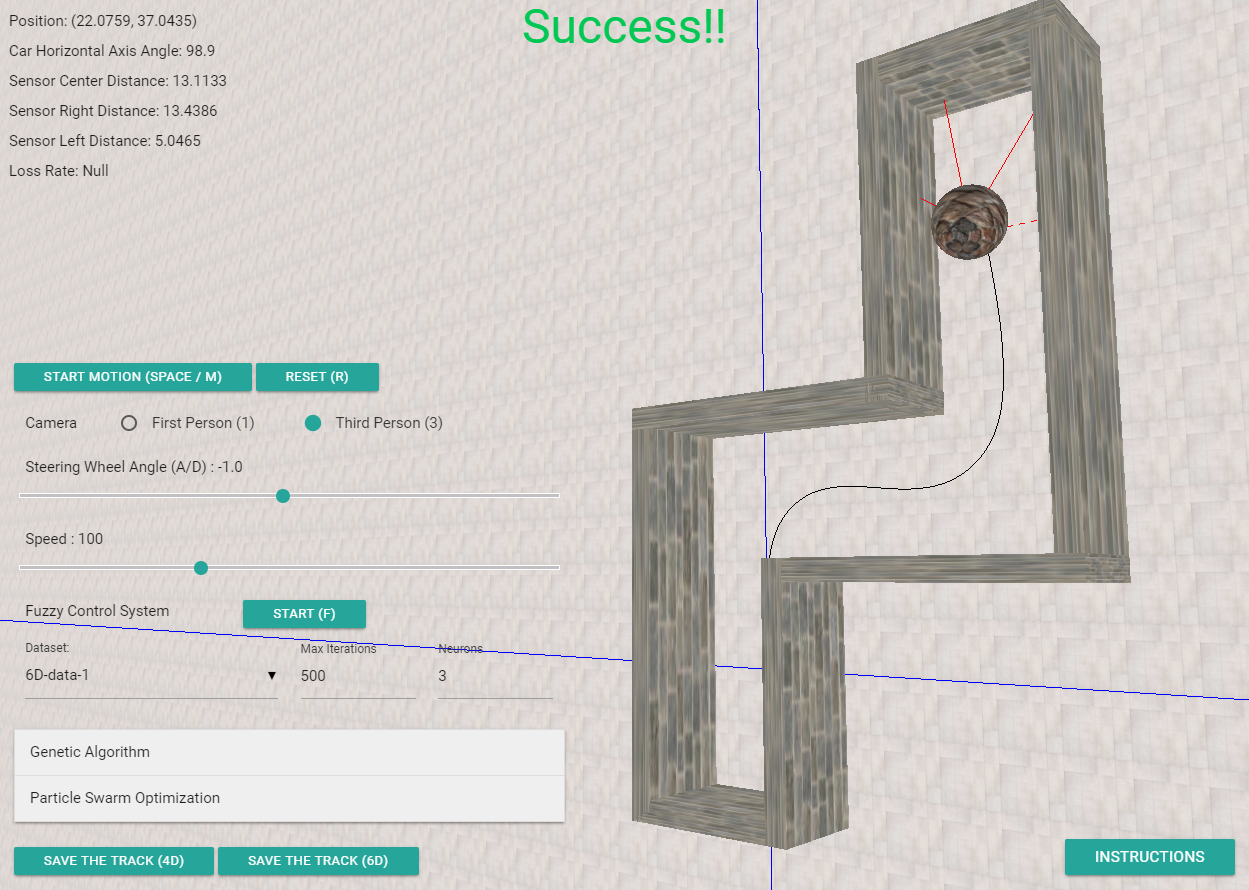
อินพุตประกอบด้วยเซ็นเซอร์วัดระยะ 3 ตัวของรถ (ด้านหน้า 45 องศาซ้ายและขวา) ซึ่งสามารถหาได้จากสมการการเคลื่อนที่ที่กำหนด ตำแหน่งของรถ และมุมระหว่างรถกับแกนนอน เอาท์พุตคือมุมการหมุนของพวงมาลัย
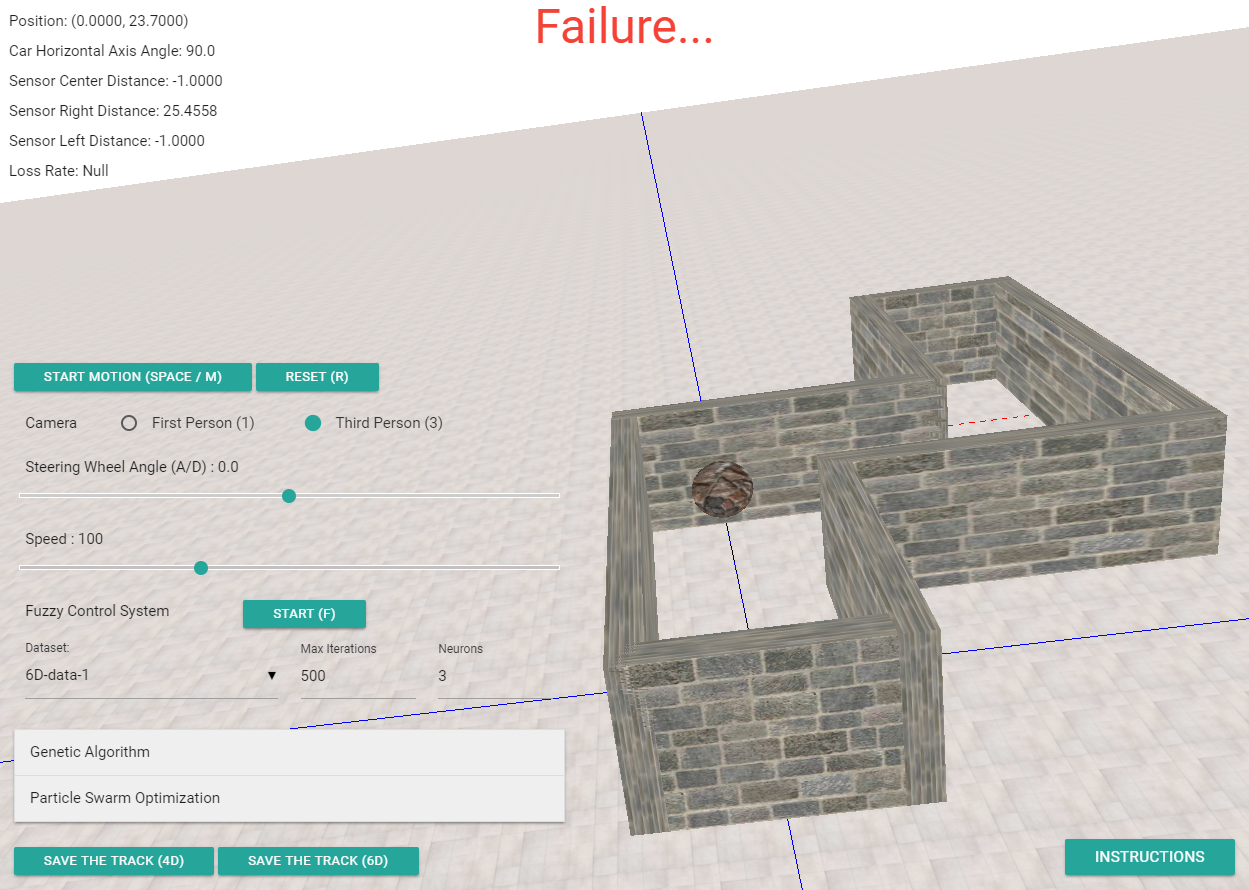
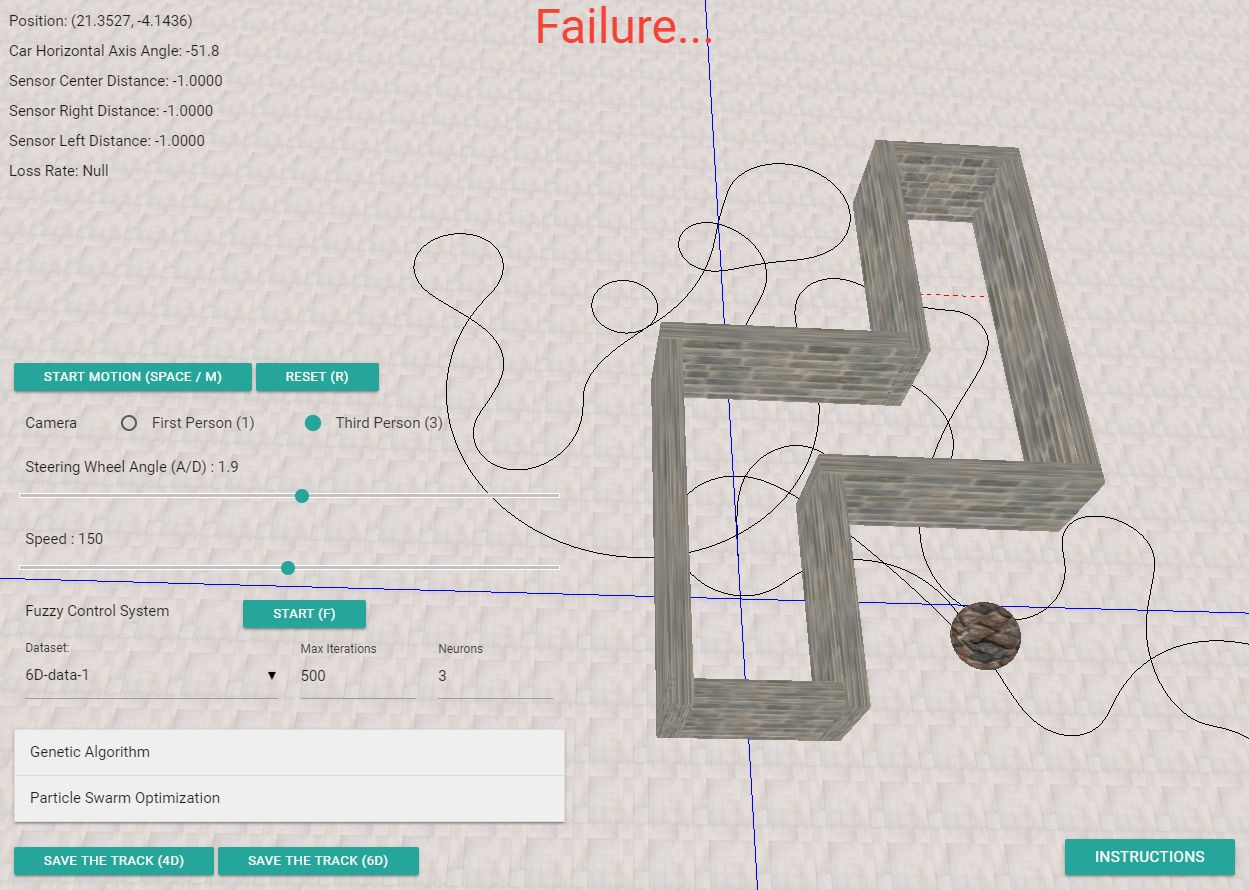
เป้าหมายคือการไปถึงเส้นท้ายโดยไม่ต้องชนผนังและส่งออกวิถีการเคลื่อนที่ (รวมถึงตำแหน่งของแต่ละจุดในเวลา ค่าเซ็นเซอร์ และมุมการหมุนของพวงมาลัย) เป็นไฟล์ข้อความ จากนั้นจะแสดงบนอินเทอร์เฟซแบบกราฟิก
สมการการเคลื่อนที่ของรถจำลองมีดังนี้:
ระบบควบคุมแบบคลุมเครือใช้กฎคลุมเครือเจ็ดแบบที่กำหนดเองและเครื่องกำจัดฟองแรงโน้มถ่วงแบบแยกส่วน ดูรายละเอียดที่นี่
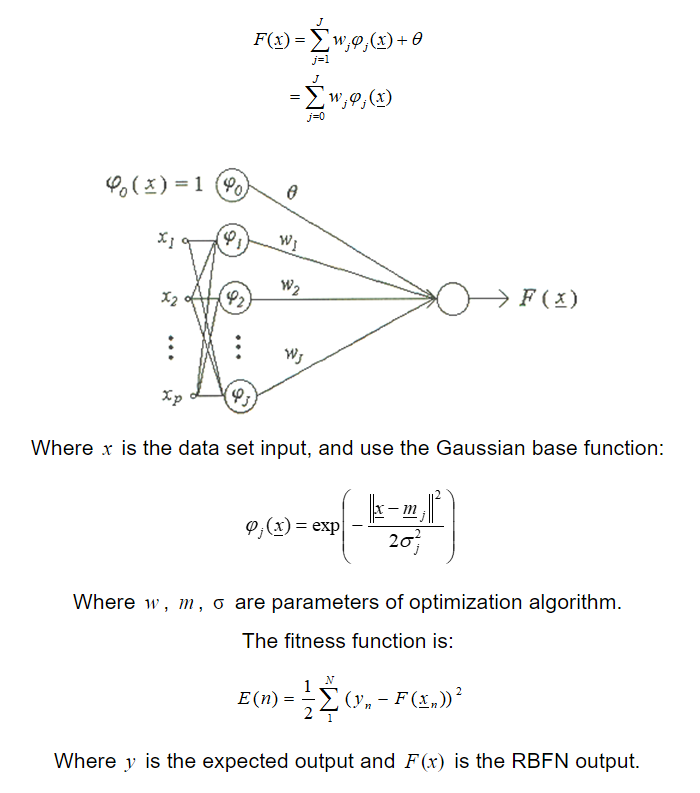
เครื่องจำลองรถใช้อัลกอริธึมทางพันธุกรรม (GA) มูลค่าจริงเพื่อฝึกเครือข่ายฟังก์ชันฐานรัศมี (RBFN) และรถจะควบคุมโดย RBFN ยีนถูกกำหนดให้เป็นพารามิเตอร์สามตัวของ RBFN (w, m, σ) ของเวกเตอร์มิติผสม ฟังก์ชันฟิตเนสคือความแปรปรวนเฉลี่ยของเอาต์พุตที่คาดหวังของชุดข้อมูลและเอาต์พุต RBFN ในกรณีอินพุตเฉพาะ ค่าความเหมาะสมต่ำสุดคือพารามิเตอร์ RBFN ที่ดีที่สุด
โครงสร้างของเครือข่ายฟังก์ชันฐานรัศมีมีดังนี้:
เครื่องจำลองรถยังสามารถใช้การเพิ่มประสิทธิภาพการจับกลุ่มอนุภาค (PSO) เพื่อฝึก RBFN ได้อีกด้วย พิกัด PSO ถูกกำหนดให้เป็นพารามิเตอร์สามตัวของ RBFN (w, m, σ) ของเวกเตอร์มิติผสม ฟังก์ชันฟิตเนสคือความแปรปรวนเฉลี่ยของเอาต์พุตที่คาดหวังของชุดข้อมูลและเอาต์พุต RBFN ในกรณีอินพุตเฉพาะ ค่าความเหมาะสมต่ำสุดคือพารามิเตอร์ RBFN ที่ดีที่สุด
https://jasonnor.github.io/Car-Simulator/
Car Simulator รองรับอุปกรณ์ VR ด้วย โปรดเปิดหน้านี้
InputA1 InputB1 InputC1 Output1
InputA2 InputB2 InputC2 Output2
...
โดยที่ InputA คือค่าของเซ็นเซอร์ระยะกึ่งกลาง InputB คือค่าของเซ็นเซอร์ระยะห่างด้านขวา InputC คือค่าของเซ็นเซอร์ระยะห่างด้านซ้าย และเอาต์พุตคือมุมการหมุนของพวงมาลัย ชุดข้อมูลเริ่มต้นสามารถพบได้ที่นี่
InputA1 InputB1 InputC1 InputD1 InputE1 Output1
InputA2 InputB2 InputC2 InputD1 InputE1 Output2
...
โดยที่ InputA คือพิกัด X ของรถยนต์, InputB คือพิกัด Y ของรถยนต์, InputC คือค่าของเซ็นเซอร์ระยะกึ่งกลาง, InputD คือค่าของเซ็นเซอร์ระยะด้านขวา, InputE คือค่าของเซ็นเซอร์ระยะด้านซ้าย และเอาต์พุตคือมุมการหมุนของพวงมาลัย ชุดข้อมูลเริ่มต้นสามารถพบได้ที่นี่
โปรดใช้มันได้ตามสบายหากคุณสนใจที่จะแก้ไขปัญหาและสนับสนุนฐานโค้ดโดยตรง
Car Simulator เปิดตัวภายใต้ใบอนุญาต MIT ดูไฟล์ใบอนุญาตสำหรับรายละเอียด


