jetson nano baseboard
v1.4.6
ลิขสิทธิ์ (c) 2020-2024 Antmicro

โครงการนี้มีไฟล์ออกแบบฮาร์ดแวร์แบบเปิดสำหรับกระดานข้างก้นที่รองรับ Nvidia Jetson Nano, Xavier NX และ TX2 NX SOMS มันถูกสร้างขึ้นโดย Antmicro ฮาร์ดแวร์ที่กำหนดเองซอฟต์แวร์และ บริษัท วิศวกรรม AI และพันธมิตรระบบนิเวศ Jetson ของ Nvidia บอร์ดสามารถเชื่อมต่อกับอุปกรณ์วิดีโอ MIPI CSI-2 ผ่านตัวเชื่อมต่อสายเคเบิลแบนแบบครบวงจร (FFC) แบบครบวงจรซึ่งรองรับเซ็นเซอร์สูงสุด 4 ตัวในการกำหนดค่า 2 เลนหรือเซ็นเซอร์ 3 ตัวในการกำหนดค่า 4 เลน โปรดดูคู่มือการออกแบบผลิตภัณฑ์สำหรับ SOM ที่เกี่ยวข้องสำหรับรายละเอียดเพิ่มเติมเกี่ยวกับการแมปเลน CSI ที่รองรับ คุณจะพบแหล่งข้อมูลที่เกี่ยวข้องกับ SOM ในศูนย์ดาวน์โหลด Jetson ของ Nvidia
กระดานข้างกระดานซึ่งเป็นตัวแปรที่กำหนดเองที่ออกแบบโดย Antmicro ต่อข้อกำหนดของลูกค้าและอุปกรณ์เสริมที่จำเป็นสามารถซื้อได้จากส่วนประกอบหุ่นยนต์ที่มีความสามารถ
ไฟล์การออกแบบสำหรับโครงการนี้เริ่มต้นจาก Rev. 1.5 มีให้และดูแลรักษาใน KICAD การแก้ไขที่เก่ากว่าของคณะกรรมการจัดทำขึ้นใน Altium Designer และถูกเก็บไว้ในสาขาแยกต่างหาก
ไดเรกทอรีหลักประกอบด้วยไฟล์การออกแบบ KICAD ใบอนุญาตและ readMe ไฟล์ที่เหลือจะถูกเก็บไว้ในไดเรกทอรีต่อไปนี้:
img - มีกราฟิกสำหรับ readme นี้doc - มีแผนผังที่สร้างขึ้นและเอกสารอื่น ๆlinux-patches - มีแพตช์ที่เพิ่มการรองรับกล้องสำหรับโมดูลกล้องจาก Allied Vision (ดูส่วน BSP ด้านล่าง) บอร์ดสามารถผลิตและประกอบโดยใช้ไฟล์การออกแบบที่ให้ไว้ โปรดดูที่เลเยอร์เชิงกลสำหรับข้อมูลเพิ่มเติมเกี่ยวกับ PCB stackup ที่แนะนำสำหรับการผลิต บอร์ดสามารถขับเคลื่อนด้วยแรงดันไฟฟ้าในช่วง 6-36VDC ขอแนะนำให้ใช้การจัดหา 12V 2A DC เพื่อเปิดเครื่องบอร์ด บอร์ดมีซีเควนเซอร์พลังงานในตัวที่เริ่มโมดูลโดยอัตโนมัติทันทีหลังจากใช้แหล่งจ่ายไฟ
อินเทอร์เฟซ I / O ของกระดานข้างก้นได้รับการสนับสนุนใน Linux มาตรฐานสำหรับ TEGRA (L4T) BSP ที่จัดทำโดย NVIDIA สำหรับ Jetson Nano / Xavier NX / TX2 NX BSP ควรทำงานร่วมกับกระดานรองพื้นโอเพนซอร์ส Jetson ออกจากกล่อง อย่างไรก็ตามในการใช้กระดานข้างกระดานกับกล้องและอุปกรณ์เสริมอื่น ๆ ที่คุณอาจต้องทำการดัดแปลง หากคุณวางแผนที่จะใช้บอร์ดกับเซ็นเซอร์ภาพอัลเวียมที่มีวิสัยทัศน์ที่เป็นพันธมิตรมีไดเรกทอรี linux-patches ซึ่งมีไฟล์แพตช์ที่เพิ่มการรองรับกล้อง Vision Allied สำหรับกระดานข้างก้นนี้ด้วยโมดูล Jetson Nano NX แพตช์ถูกตั้งชื่อด้วยการปล่อย L4T และสามารถนำไปใช้กับสาขาที่สอดคล้องกันของที่เก็บ Linux ที่ปล่อยออกมาโดยพันธมิตรวิสัยทัศน์ บริการของ Antmicro เกี่ยวข้องกับการพัฒนา BSP เพื่อให้คุณสามารถจ้างเราเพื่อทำการปรับเปลี่ยนที่จำเป็นสำหรับคุณ
คุณสามารถใช้ตัวเชื่อมต่ออินเตอร์เฟส USB OTG เพื่ออัปโหลดอิมเมจ BSP ไปยัง SOM ที่แทรกลงในกระดานข้างก้น
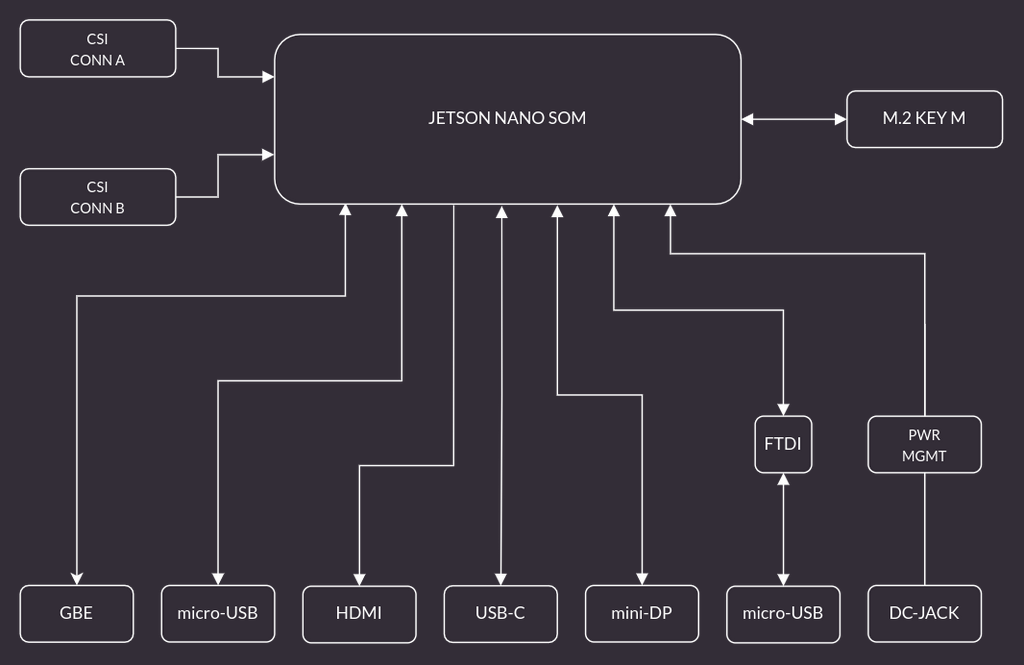
ข้อความการดีบักส่วนใหญ่มีให้ผ่านคอนโซลอนุกรม บอร์ดประกอบด้วยชิป FTDI ที่ให้อินเทอร์เฟซ UART ไปยังพีซีโฮสต์ โปรดดูเอกสารแผนผังสำหรับรายละเอียดเพิ่มเติม ช่อง Debug uart เริ่มต้นสามารถเข้าถึงได้ผ่าน /dev/ttyUSB0 (สมมติว่าไม่มีหน่วย FTDI อื่นที่เชื่อมต่อกับพีซีของคุณ) baudrate เริ่มต้นสำหรับการเชื่อมต่อการดีบักแบบอนุกรมคือ 115200 baud ด้วยการส่ง 8 บิต, 1 หยุดบิตและไม่มีการควบคุมการไหล
การแก้ไขล่าสุดของบอร์ด (1.5.x) รวมถึงไฟล์การออกแบบที่แปลงเป็น KICAD BOM ได้รับการเปลี่ยนแปลงเพื่อให้คณะกรรมการสามารถผลิตได้แม้จะมีสถานการณ์การขาดแคลนชิปทั่วโลก Revision 1.5.x เปลี่ยน I2C multiplexer (PCA9548 -> PCA9547) ที่ใช้สำหรับการจัดการกล้องและอุปกรณ์เสริมวิดีโอ คุณอาจต้องปรับรายการ DeviceTree สำหรับอุปกรณ์เสริมวิดีโอเพื่อให้พวกเขาทำงานกับชิป Multiplexer I2C ใหม่
โครงการนี้ได้รับใบอนุญาตภายใต้ใบอนุญาต Apache-2.0


