ROScribe
v0.0.4
สร้างแพ็คเกจ ROS โดยใช้ LLMS
การใช้อินเทอร์เฟซภาษาธรรมชาติเพื่ออธิบายโครงการหุ่นยนต์ Roscribe กำจัดอุปสรรคทักษะของการใช้ ROS สำหรับผู้เริ่มต้นและประหยัดเวลาและความยุ่งยากสำหรับวิศวกรที่มีทักษะ Roscribe ผสมผสานพลังที่แท้จริงและความยืดหยุ่นของรุ่นภาษาขนาดใหญ่ (LLMS) เข้ากับเทคนิคการปรับแต่งพร้อมใช้งานเพื่อจับรายละเอียดการออกแบบหุ่นยนต์ของคุณและเพื่อสร้างแพ็คเกจ ROS ทั้งหมดสำหรับโครงการของคุณโดยอัตโนมัติ
Roscribe สร้างพื้นที่ทำงานของ ROS ทั้งหมดผ่านวิธีการหลายขั้นตอนตัวแทนซึ่งแต่ละขั้นตอนจะมุ่งเน้นไปที่การออกแบบซอฟต์แวร์หุ่นยนต์โดยเฉพาะ โดยเฉพาะอย่างยิ่ง Roscribe ช่วยคุณในขั้นตอนต่อไปนี้:
หากคุณยังใหม่กับ ROS Roscribe จะเป็นที่ปรึกษาหุ่นยนต์ (ICS) ของคุณ? ️
หากคุณเป็นผู้ใช้ ROS ที่มีประสบการณ์ Roscribe สามารถช่วยสร้างพิมพ์เขียวสำหรับแพ็คเกจ ROS ของคุณได้หรือไม่️
Roscribe ประกอบด้วยตัวแทน 4 คน รายการด้านล่างนี้รายละเอียดความรับผิดชอบของแต่ละเอเจนต์ที่แสดงในลำดับของการโต้ตอบ:
SpecAgent : ช่วยด้วยโครงกระดูกโดยรวมของโครงการของคุณ ในแง่ ROS มันจะสร้างกราฟ ROS ของโครงการของคุณซึ่งแต่ละส่วนของกราฟสามารถสร้างหรือดึงออกมาจากแหล่งโอเพ่นซอร์สGenAgent : ด้วยกราฟ ROS เอเจนต์นี้จะสร้างพื้นที่ทำงาน ROS และรหัสสำหรับแต่ละโหนด ROS ใน Python อีกทางเลือกหนึ่งสามารถดาวน์โหลดการใช้งานโอเพนซอร์ซสำหรับโหนด ROSPackAgent : ด้วยความรู้เกี่ยวกับพื้นที่ทำงานของ ROS ที่สร้างขึ้นตัวแทนนี้จะสร้างไฟล์เปิดตัว ROS ที่นำโหนด ROS ขึ้นมา นอกจากนี้ package.xml , CMakeLists.txt และไฟล์ README.md ถูกสร้างขึ้นโดยเอเจนต์นี้SupportAgent : นี่คือตัวแทนฝ่ายสนับสนุนลูกค้าของคุณซึ่งสามารถช่วยคุณได้เมื่อใดก็ตามที่คุณพบข้อผิดพลาดในระหว่างการเรียกใช้โครงการของคุณ เอเจนต์สามารถเข้าถึงเค้าโครงของโครงการแล้วและสามารถอ่านไฟล์ที่สร้างขึ้นภายในได้ รูปต่อไปนี้แสดงให้เห็นถึงสถาปัตยกรรมของ Roscribe: 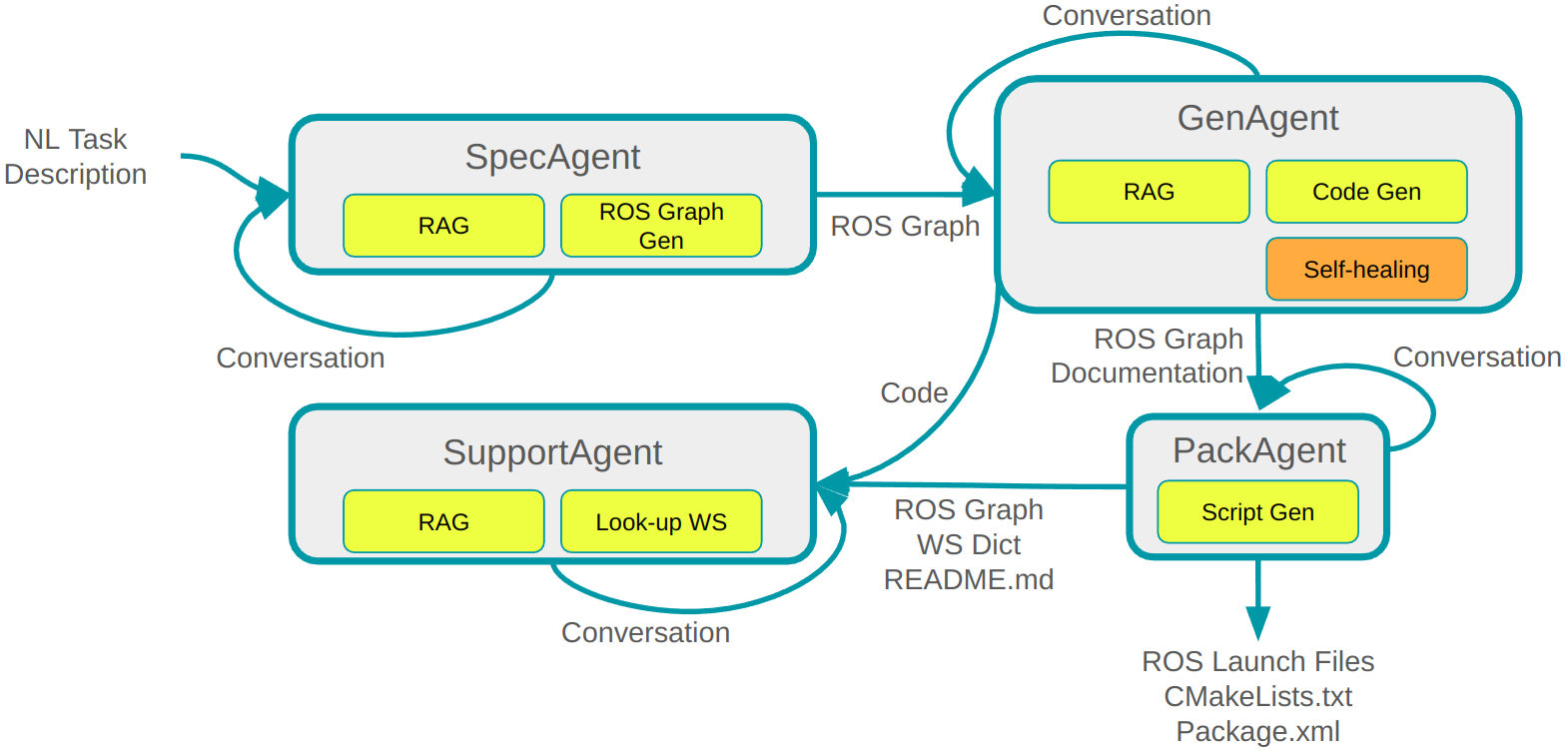
โปรดดูหน้า Wiki ของเราเพื่อเรียนรู้วิธีการติดตั้งและใช้ Roscribe ในโครงการหุ่นยนต์ของคุณ:
มองเข้าไปใน Roscribe และแนวคิดของแพลตฟอร์มหุ่นยนต์ที่ใช้ LLM
การนำเสนอสไลด์ของ UCSD ROS Workshop 27 ตุลาคม 2566
การบันทึกวิดีโอของงานนำเสนอการประชุมเชิงปฏิบัติการ UCSD ROS 27 ตุลาคม 2566
สำหรับการสอบถามทางธุรกิจเช่นการให้คำปรึกษาหรืองานทำสัญญากรุณาติดต่อ [email protected]
ในฐานะโครงการโอเพ่นซอร์สเราสนับสนุนให้ผู้ที่ชื่นชอบหุ่นยนต์ทุกคนมีส่วนร่วมในการ Roscribe ในระหว่างการเปิดตัวแต่ละครั้งเราจะประกาศรายชื่อผู้มีส่วนร่วมใหม่


