Navigating Ryze Tello Drones With MATLAB App
v1.1.1
為了以互動方式控制連接到執行 MATLAB® 的電腦的 Ryze® Tello Drone,MathWorks® 提供了 MATLAB 應用程式 - Ryze Tello Navigator。這個應用程式可以幫助您:
查看所有連接到電腦 WiFi 網路的 Ryze Tello 無人機。
執行無人機的起飛/降落。
使用鍵盤或應用程式中的導航控制按鈕控制無人機的導航。
預覽相機輸入並捕捉影像。
將無人機的視訊輸入記錄到 MATLAB 工作區變數中。
產生用於完成導覽的 MATLAB 腳本。
為 Ryze Tello 無人機安裝 MATLAB 和 MATLAB 支援包
執行初始設定和配置並連接到一台或多台 Ryze Tello 無人機。
下載或克隆此儲存庫。
導航至 MATLAB 中的本機儲存庫資料夾
在 MATLAB 命令視窗中執行以下命令:
新增路徑(密碼);
保存路徑;
透過執行ryzeTelloNavigator命令啟動應用程式。
需要 MATLAB 版本 R2022a 或更高版本
適用於 Ryze Tello® 無人機的 MATLAB® 支援包
確保設備清單中顯示的無人機是您想要使用應用程式控制的無人機。如果無人機未列出,請再次執行設定和配置。
| 步 | 行動 | 結果 |
|---|---|---|
| 1 |  從設備清單中點擊無人機的名稱,然後點擊頂部導航部分中的飛行前檢查。 從設備清單中點擊無人機的名稱,然後點擊頂部導航部分中的飛行前檢查。 | 將出現一個新對話框「運行飛行前檢查表」。在進行飛行前檢查時,應用程式中的所有其他控制項均已停用。如果發生錯誤,該對話框會提供所需故障排除步驟的鏈接 |
| 2 | 確認所有飛行前檢查均已成功完成後,按一下「確定」。 |  飛行前檢查已完成指示顯示在應用程式的右側。所有其他控制項也已啟用。 飛行前檢查已完成指示顯示在應用程式的右側。所有其他控制項也已啟用。 |
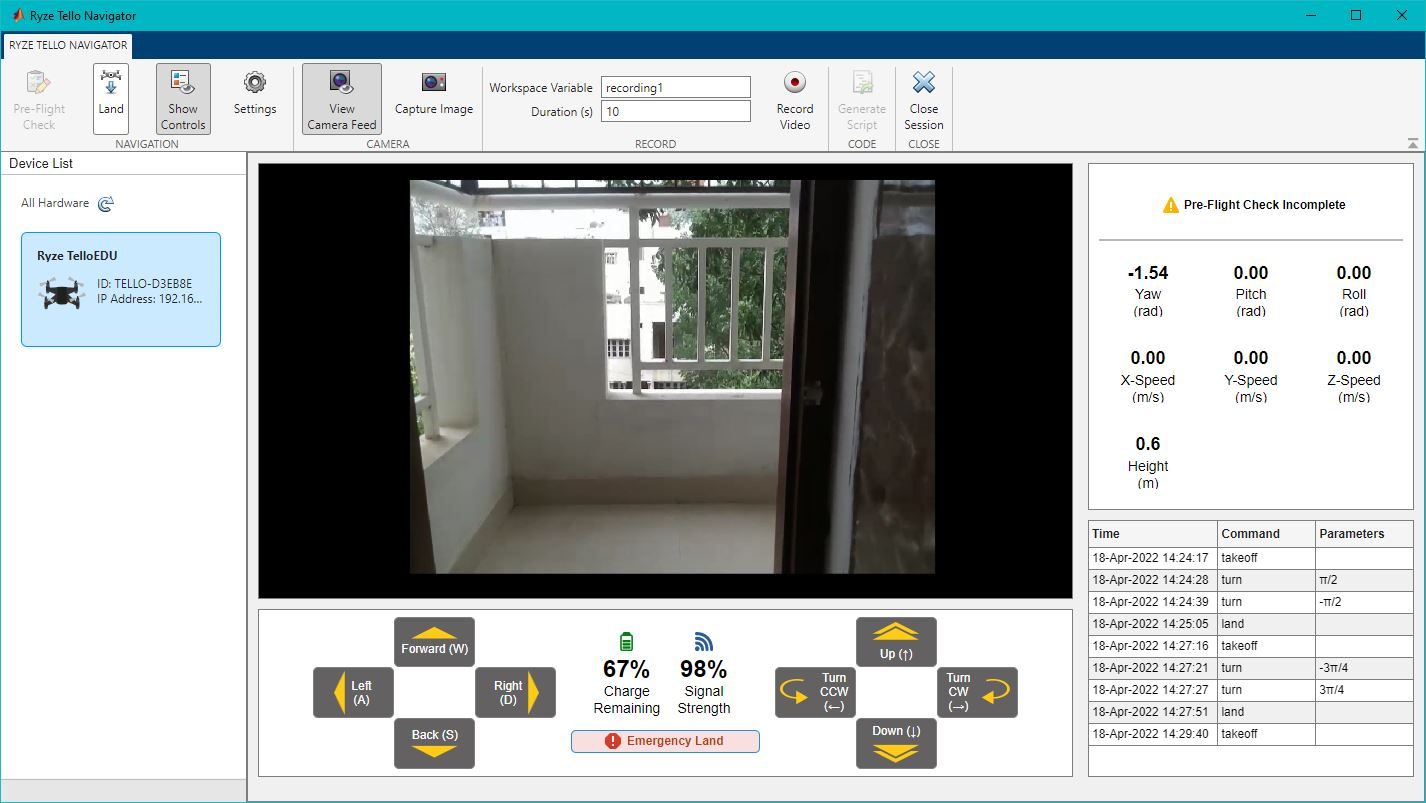
Ryze Tello Navigator 可協助您執行起飛/降落並互動式控制 Ryze Tello 無人機。
注意:在開始無人機起飛之前,請考慮一般安全預防措施。如果您在起飛過程中或執行手動導航控制時(如後續步驟所述)感覺到無人機及周圍環境可能發生任何損壞,您可以點擊緊急降落。點擊此按鈕會觸發無人機馬達緊急關閉,使其從當前高度掉落到地面(對於 Tello EDU 無人機)或強制無人機從目前位置垂直著陸(對於 Tello 無人機)。
| 步 | 行動 | 結果 |
|---|---|---|
| 1 |  檢查應用程式中顯示的無人機電池電量和訊號強度是否足以執行起飛和控制。 檢查應用程式中顯示的無人機電池電量和訊號強度是否足以執行起飛和控制。 | |
| 2 |  按一下「查看攝影機來源」以驗證無人機的攝影機來源是否正常運作。 按一下「查看攝影機來源」以驗證無人機的攝影機來源是否正常運作。 | 該應用程式會顯示無人機起飛前相機所看到的預覽。稍後,當無人機移動時,預覽將根據攝影機的即時回饋進行更新。 |
| 3 |  按鍵盤上的空白鍵或按一下工具列區域導航部分中顯示的起飛。 按鍵盤上的空白鍵或按一下工具列區域導航部分中顯示的起飛。 | 無人機的馬達啟動,無人機起飛到特定高度並在該位置懸停。起飛按鈕被降落按鈕取代。 |
| 4 | 透過點擊應用程式中的相應圖標或使用鍵盤,從應用程式對無人機進行手動導航。 | 無人機根據您觸發的導航控制移動。如果啟用了相機來源(預覽),也會更新。若要增加應用程式中看到的預覽視窗區域,您可以隱藏顯示手動控制按鈕的窗格。按一下「顯示控制項」以停用該窗格。您仍然可以使用鍵盤按鍵來控制無人機。 |
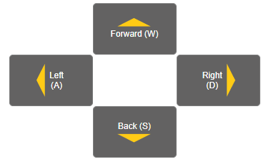
WASD 鍵:
W——前進
A – 向左移動
S – 向後移動
D-向右移動
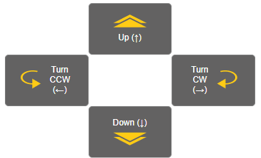
箭頭鍵:
▲ – 向上移動無人機
▼ – 向下移動無人機
◄ – 逆時針轉動無人機
► – 順時針轉動無人機
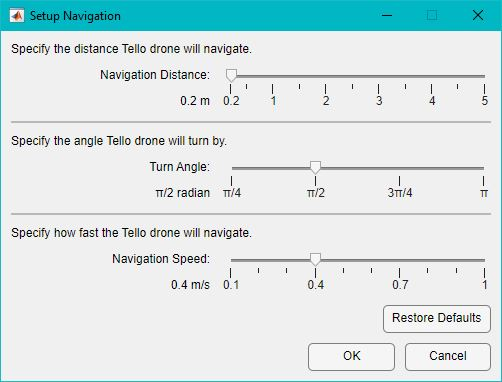
您可以變更每次觸發沿特定方向移動時無人機使用的導航設定。按一下「設定」開啟「設定導覽」對話框,然後使用滑桿指定距離、角度和速度值。如果要恢復預設值(導航距離:0.2m,轉彎角度:π/2,導航速度:0.4m/s),請在對話方塊中按「恢復預設值」 。

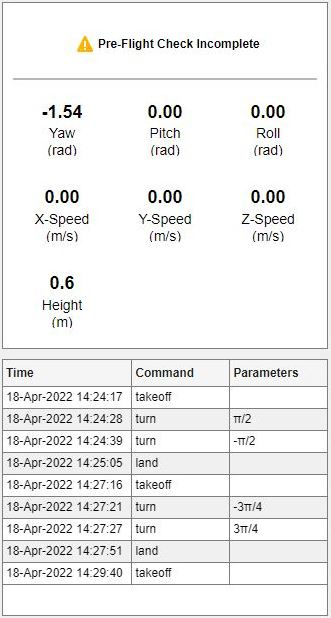
該應用程式還顯示即時導航數據(由無人機感測器捕獲)以及使用導航按鈕或鍵盤按鍵觸發的命令日誌。此資訊顯示在右側面板上。
Ryze Tello Navigator 可協助您捕捉透過 Ryze Tello 無人機的 FPV 相機所看到的影像並錄製影片。
| 步 | 行動 | 結果 |
|---|---|---|
| 1 |  一次捕捉一張影像。 一次捕捉一張影像。 | 影像儲存為工作區變數。 |
| 2 | 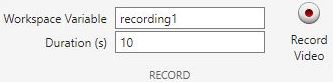 定義工作空間變數和錄製影片的持續時間,然後按一下錄製影片。 定義工作空間變數和錄製影片的持續時間,然後按一下錄製影片。 | 無人機攝影機的影片開始在指定的時間內錄製。按一下「停止」可在錄製過程中隨時停止錄製,然後影片會自動以影像陣列形式儲存在工作區中。 |
Ryze Tello Navigator 可協助您產生執行導覽的即時編輯器腳本。您可以使用此腳本定義無人機的初始設定和飛行路徑,然後新增自訂演算法以執行其他工作流程。

為此,請在成功著陸無人機後點擊“生成腳本” 。
| 警告 | 問題和建議的行動 |
|---|---|
| 電池電量低 | 如果剩餘電量指示顯示的值低於 20% 並且無人機正在飛行或懸停,應用程式將開始顯示警告。如果電池電量低於 10%,無人機會自動從目前位置降落。為避免這種情況,請確保使用應用程式中的「著陸」按鈕使無人機著陸,然後更換無人機的電池。 |
| 訊號強度低 | 當無人機飛行時,該應用程式會不斷顯示訊號強度值。當訊號強度低於20%時,建議您採取必要的措施,以免無人機失控。如果與無人機的連接遺失,則會出現一個對話框,顯示與無人機重新連接的選項。如果仍然失敗,則會顯示錯誤訊息。 |
許可證可在此 GitHub 儲存庫的 LICENSE.TXT 檔案中找到。
MATLAB 中心
版權所有 2022 MathWorks, Inc.


