Car Simulator
1.0.0
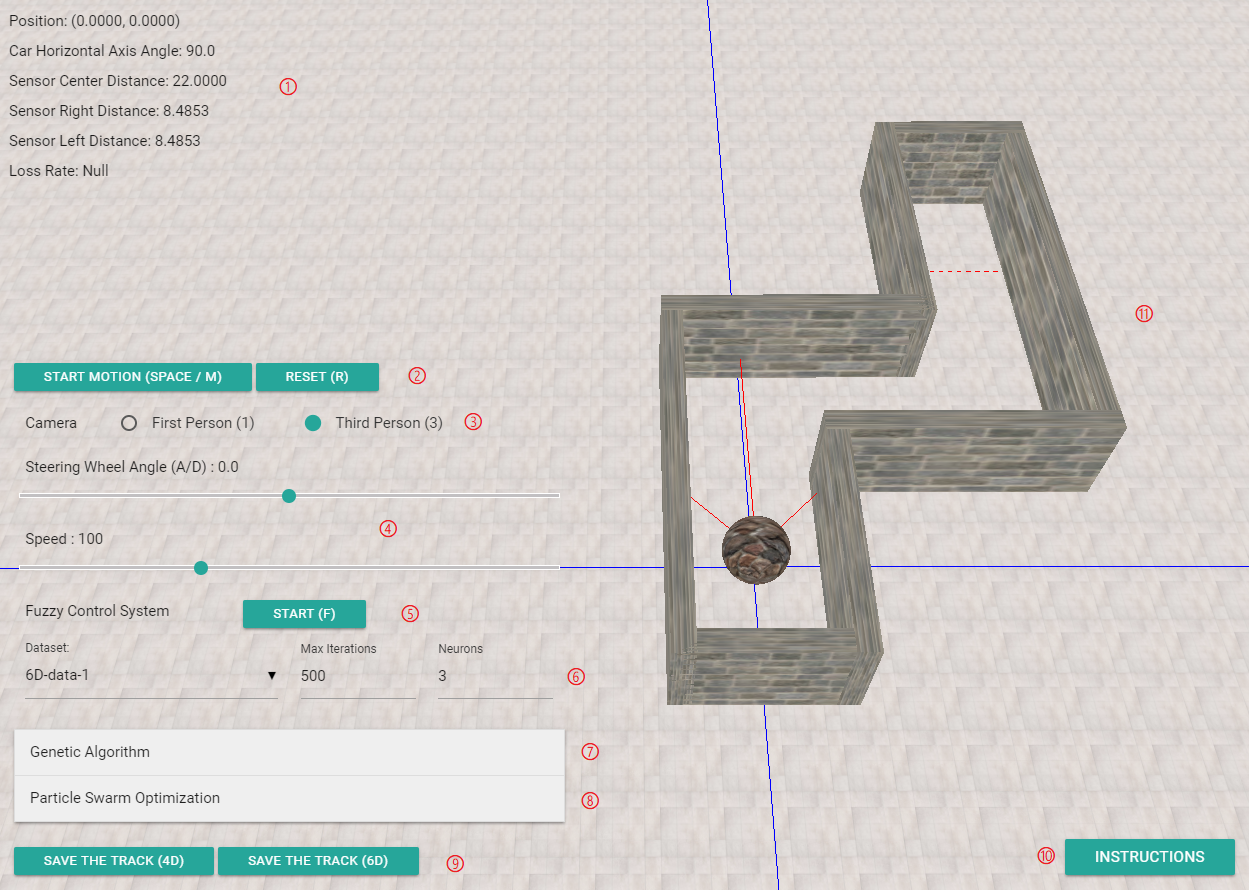
汽車模擬器使用模糊控制系統、遺傳演算法和粒子群最佳化來模擬自動駕駛汽車在地圖上的運動。它還支援 VR 設備,詳細資訊請參閱此處。
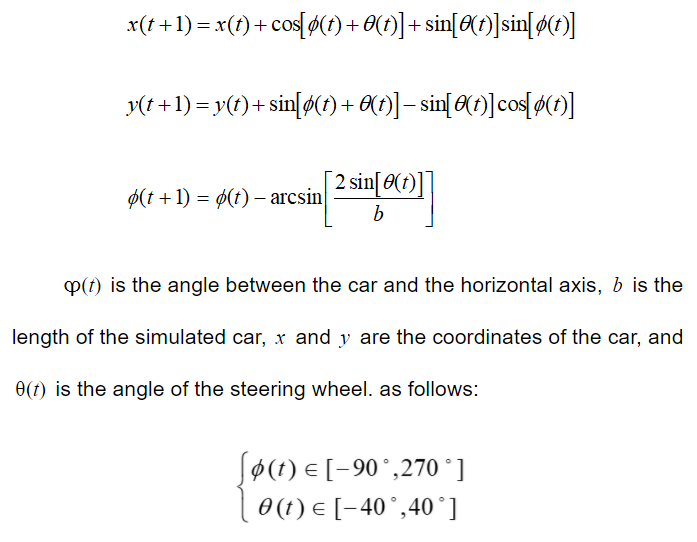
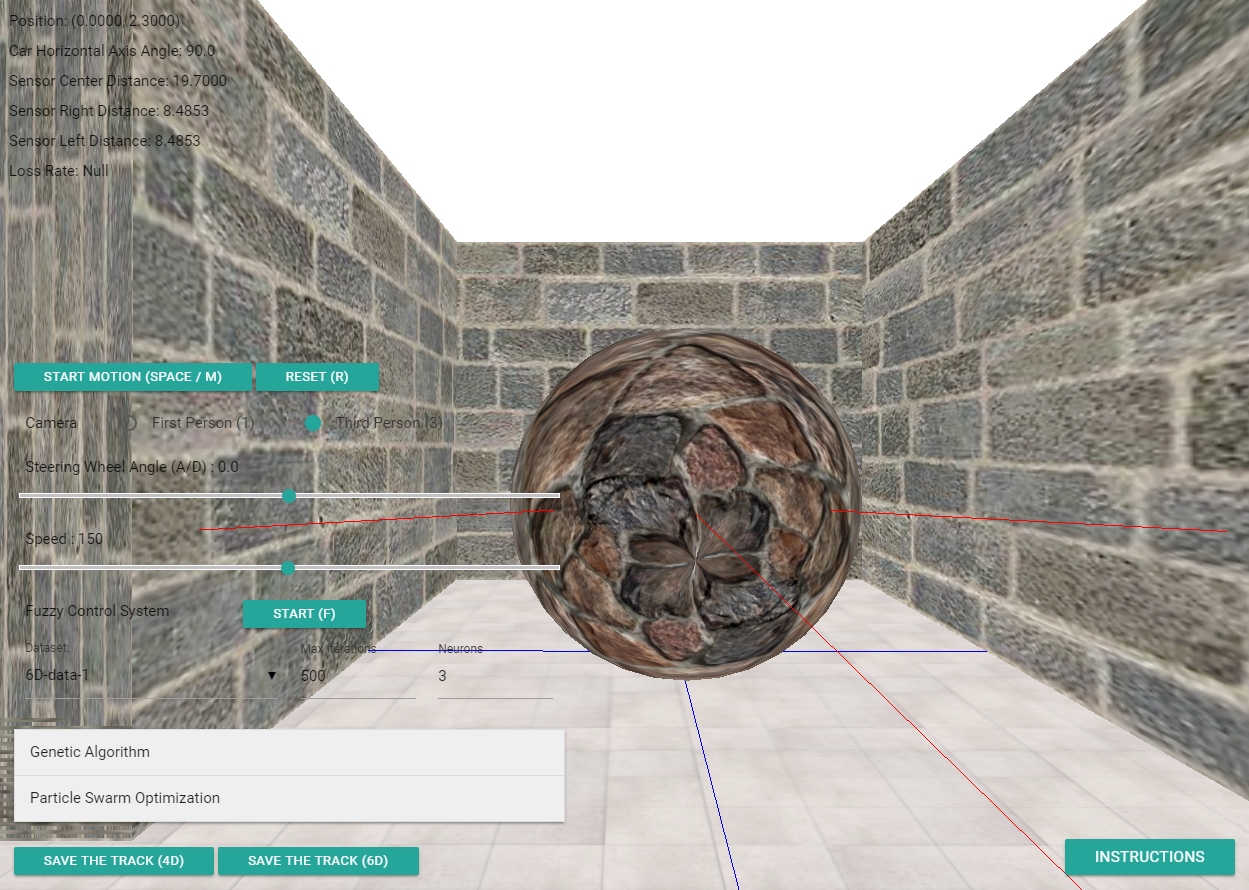
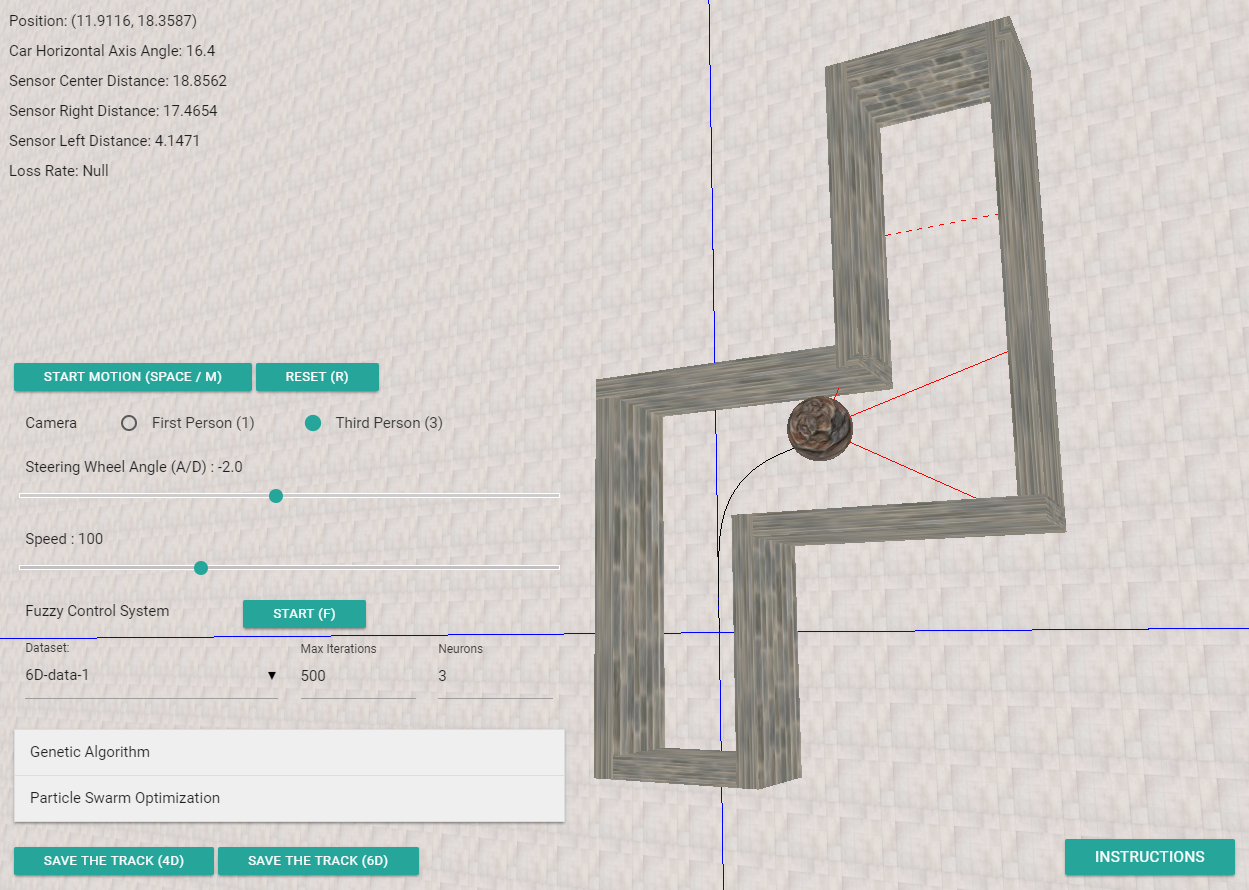
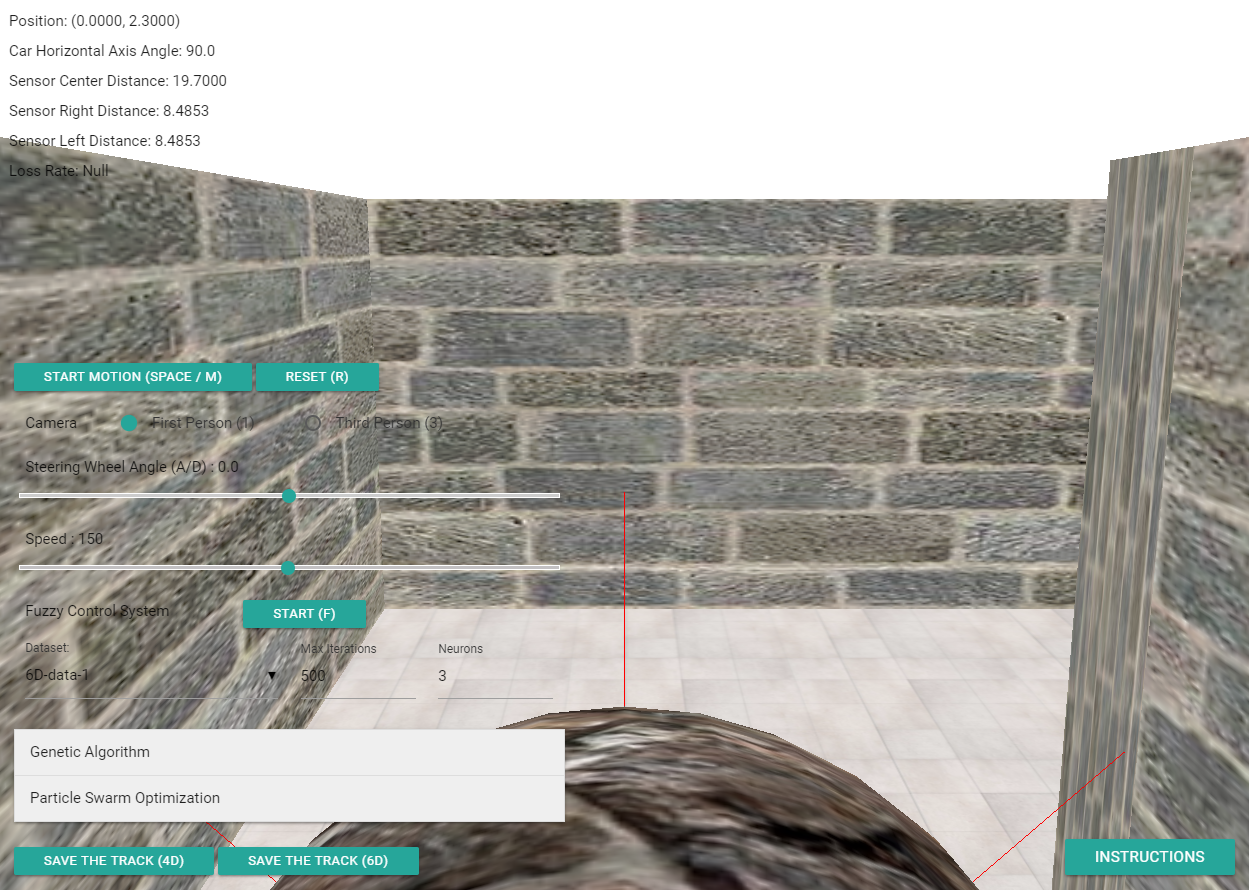
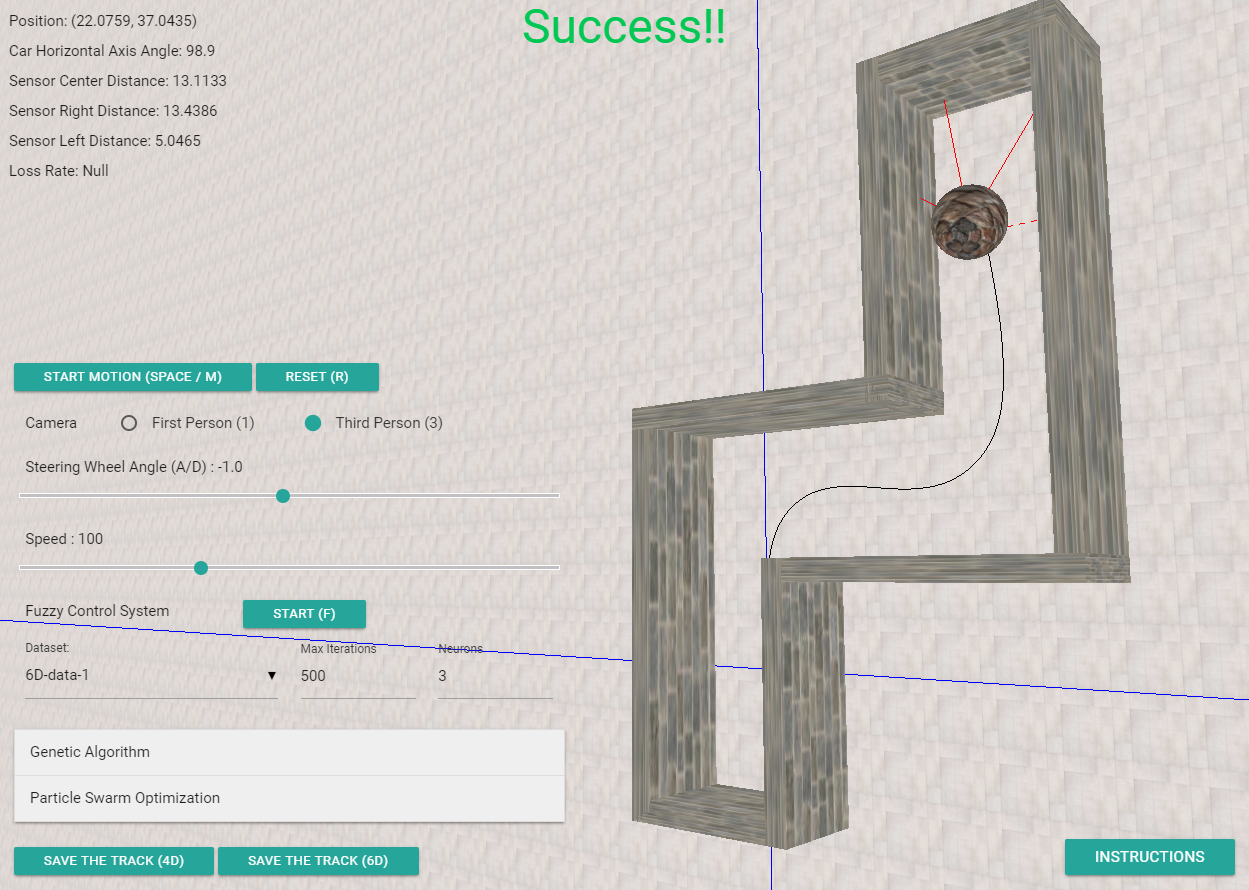
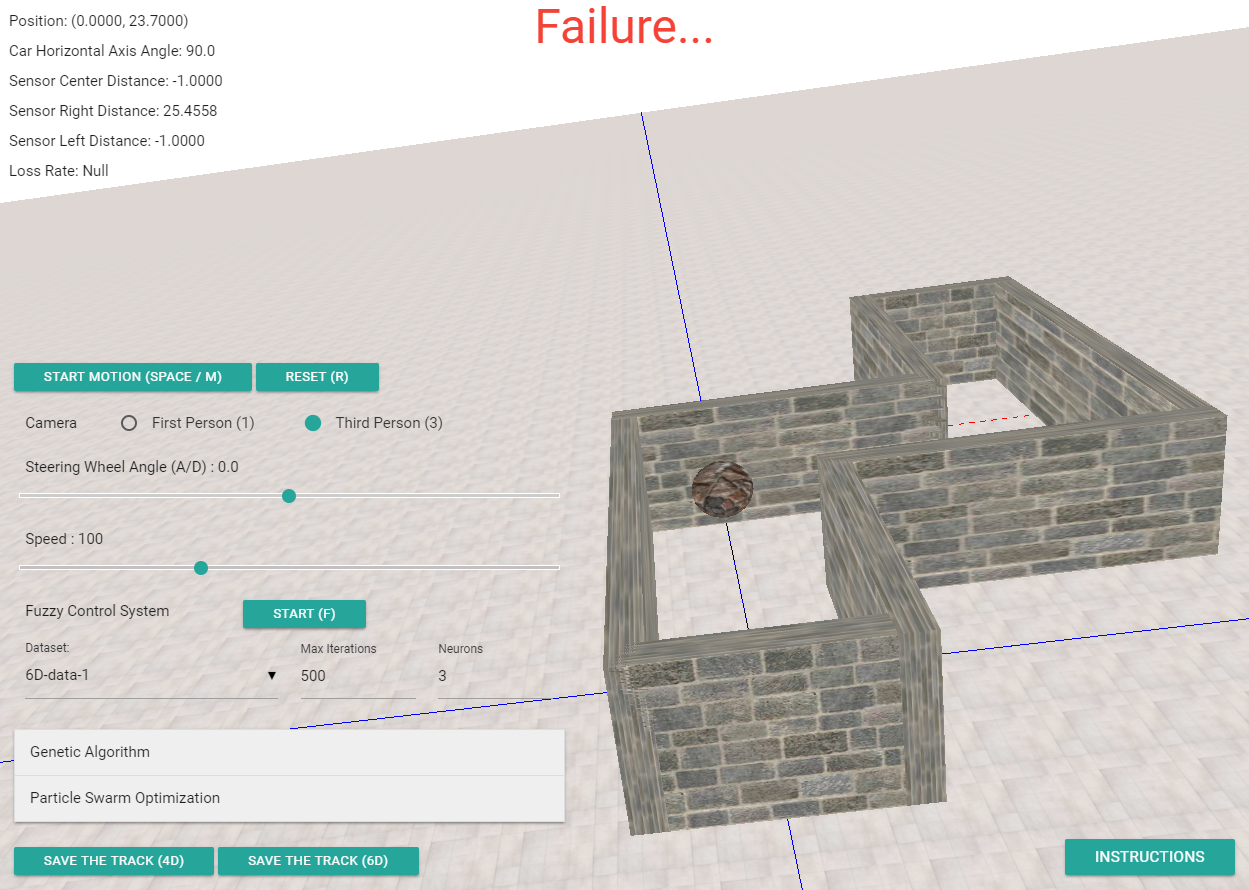
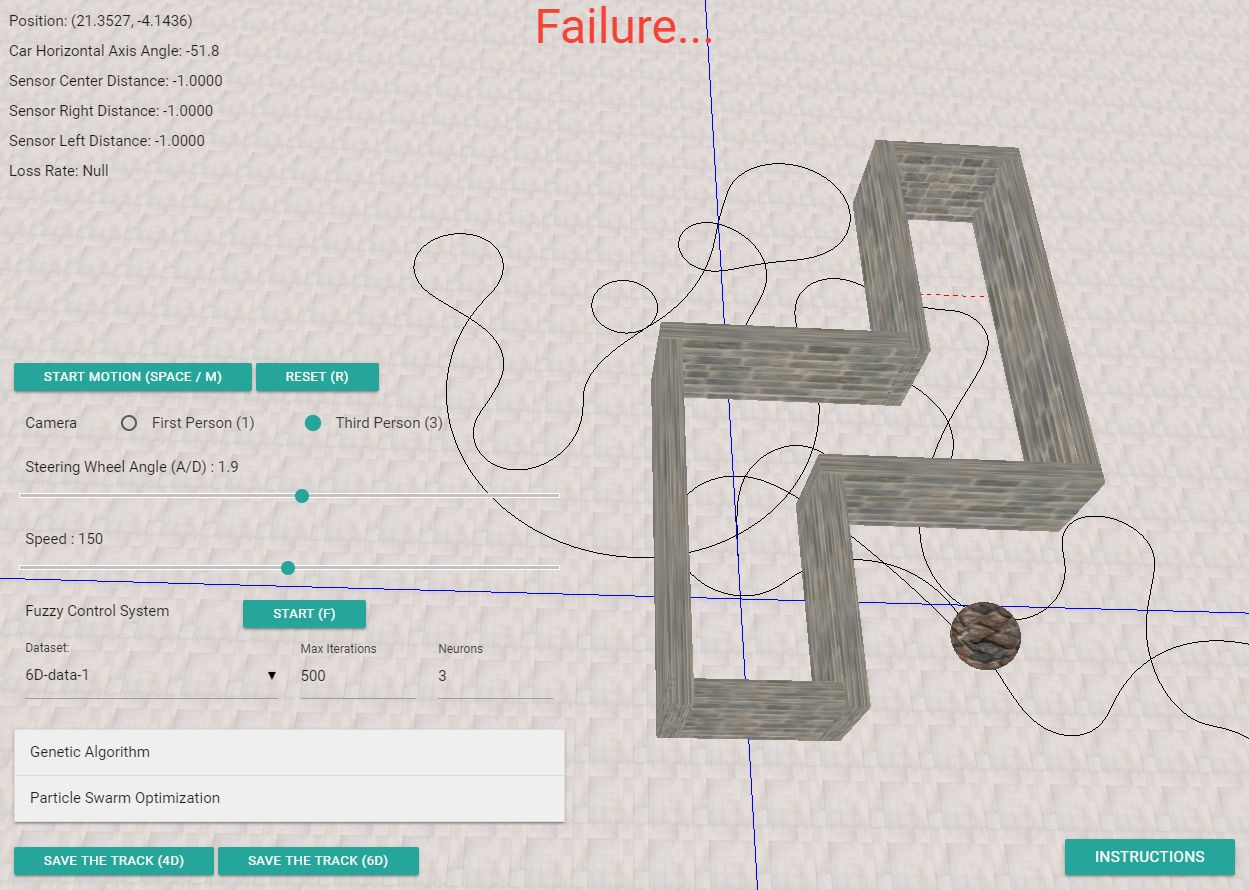
輸入包含小車的三個距離感知器(前部、左右45度),可以從定義的運動方程式、小車的位置、小車與水平軸之間的角度來獲得。輸出是方向盤的旋轉角度。
目標是在不遇到牆壁的情況下到達終點線,並將運動軌跡(包括每個時間點的位置、感測器值和方向盤的旋轉角度)輸出為文字文件,然後顯示在圖形介面上。
模擬小車的運動方程式如下:
模糊控制系統使用自訂的七個模糊規則和離散重心去模糊器。詳情請參閱此。
汽車模擬器使用實值遺傳演算法(GA)來訓練徑向基底函數網路(RBFN),並透過RBFN來控制汽車。基因被定義為混合維度向量的RBFN(w,m,σ)的三個參數。適應度函數是資料集的期望輸出與特定輸入情況下的RBFN輸出的平均值變異數。最低適應度值是最佳 RBFN 參數。
徑向基底函數網路的結構如下:
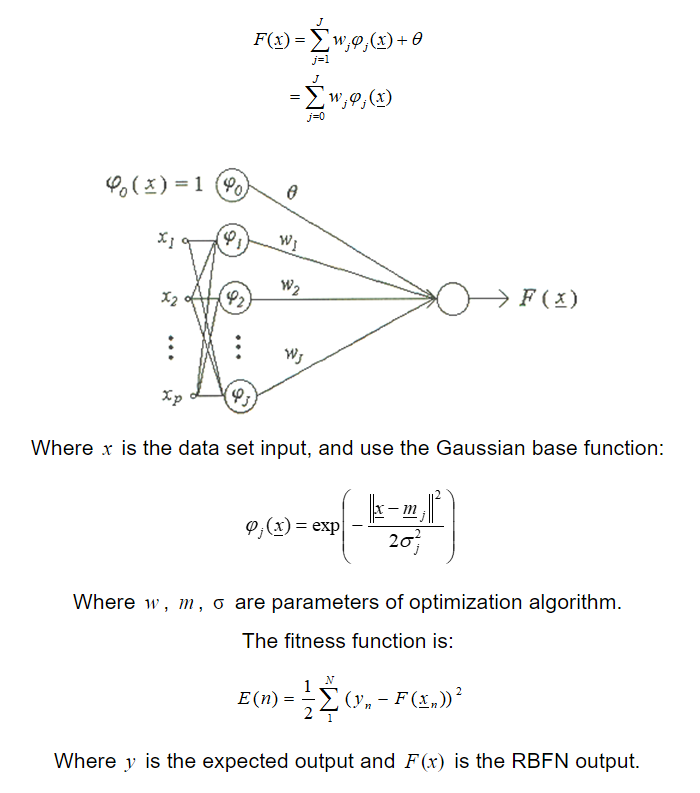
汽車模擬器也可以使用粒子群優化(PSO)來訓練RBFN。 PSO座標定義為混合維度向量的RBFN(w,m,σ)的三個參數。適應度函數是資料集的期望輸出與特定輸入情況下的RBFN輸出的平均值變異數。最低適應度值是最佳 RBFN 參數。
https://jasonnor.github.io/Car-Simulator/
汽車模擬器也支援VR設備,請開啟此頁面。
InputA1 InputB1 InputC1 Output1
InputA2 InputB2 InputC2 Output2
...
其中InputA是中心距離感測器的值,InputB是右距離感測器的值,InputC是左距離感測器的值,輸出是方向盤的旋轉角度。可以在此處找到預設資料集。
InputA1 InputB1 InputC1 InputD1 InputE1 Output1
InputA2 InputB2 InputC2 InputD1 InputE1 Output2
...
其中InputA為小車的X座標,InputB為小車的Y座標,InputC為中心距離感測器的值,InputD為右距離感測器的值,InputE為左距離感測器的值,輸出為方向盤的旋轉角度。可以在此處找到預設資料集。
如果您有興趣解決問題並直接為程式碼庫做出貢獻,請隨意使用它。
汽車模擬器是在 MIT 許可下發布的。有關詳細信息,請參閱許可證文件。


