jetson nano baseboard
v1.4.6
版權(C)2020-2024 Antmicro

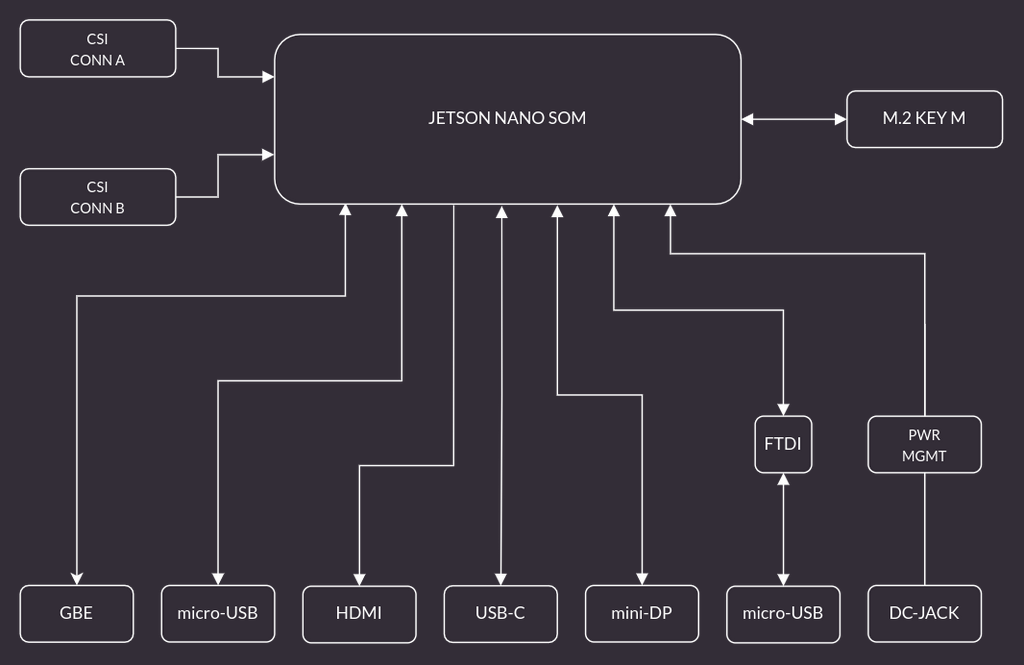
該項目包含用於支持NVIDIA JETSON NANO,XAVIER NX和TX2 NX SOM的打開硬件設計文件。它是由自定義硬件,軟件和AI工程公司和NVIDIA的Jetson生態系統合作夥伴Antmicro創建的。板可以通過統一的柔性平板電纜(FFC)連接器與MIPI CSI-2視頻設備連接,可在2車道配置或3個傳感器中以4車道配置為4個傳感器提供支持。有關支持的CSI車道映射的更多詳細信息,請參閱“產品設計指南”。您將在NVIDIA的Jetson下載中心找到與SOM相關的資源。
踢腳板,其根據客戶規格設計的自定義變體,以及可以從功能強大的機器人組件購買的必需配件。
該項目的設計文件從Rev. 1.5開始,並在KICAD中提供並維護。董事會的較舊修訂是在Altium Designer準備的,並保留在一個單獨的分支上。
主要目錄包含KICAD設計文件,許可證和讀數。其余文件存儲在以下目錄中:
img包含此讀數的圖形doc - 包含生成的原理圖和其他文檔linux-patches包含補丁,這些補丁增加了來自Allied Vision的相機模塊的相機支持(請參見下面的BSP部分) 可以使用提供的設計文件製作和組裝板。請查看機械層,以獲取有關建議用於製造的PCB堆棧的更多信息。板可以在6-36VDC範圍內通過電壓供電。建議使用12V 2A直流電源為董事會供電。板有一個集成的電源音序器,該序列器在應用電源後立即自動啟動模塊。
NVIDIA為Jetson Nano / Xavier NX / TX2 NX提供了標準Linux(L4T)BSP的標準Linux(L4T)BSP的支持。 BSP應與開箱即用的開源Jetson踢腳線一起使用。但是,要與各種攝像頭和其他配件一起使用底板,您可能需要進行修改。如果您打算將板與Allied Vision Alvium圖像傳感器一起使用,則有一個linux-patches目錄,其中包含補丁文件,其中添加了使用Jetson Nano NX模塊的盟軍視覺攝像頭的支持。貼片用L4T釋放命名,可以應用於Allied Vision發布的Linux存儲庫的相應分支。 Antmicro的服務涉及BSP開發,因此您可以僱用我們為您進行必要的修改。
您可以使用USB OTG接口連接器將BSP圖像上傳到插入板板中的SOM。
大多數調試消息都是通過串行控制台提供的。該板包括一個FTDI芯片,可為主機PC提供UART接口。有關更多詳細信息,請參考示意圖。默認的調試UART通道可以通過/dev/ttyUSB0訪問(假設沒有其他FTDI單元連接到您的PC)。串行調試連接的默認波特rate是115200波特,帶有8位傳輸,1個停止位,沒有流量控制。
董事會的最新修訂(1.5.x)包括轉換為KICAD的設計文件。 BOM已被更改,因此儘管存在全球芯片短缺情況,董事會仍可以生產。修訂版1.5.x更改用於處理攝像機和視頻配件的I2C多路復用器(PCA9548-> PCA9547)。您可能需要調整視頻配件的Devicetree條目,以使它們與新的I2C多路復用器芯片一起使用。
該項目已根據APACHE-2.0許可獲得許可。


