Nous avons toujours rêvé de robots aussi intelligents que les humains, mais entraîner des robots est bien plus difficile qu’on ne l’imagine. Les méthodes de formation traditionnelles sont soit coûteuses, soit inefficaces. Pour résoudre ce problème, des chercheurs de l'Université de Stanford ont mis au point une solution ingénieuse : les cousins numériques. L'éditeur de Downcodes vous donnera une compréhension approfondie de cette technologie révolutionnaire, de la manière dont elle réduit les coûts de formation, améliore la robustesse des robots et, à terme, propulse la technologie robotique vers de nouveaux sommets.
Nous avons toujours rêvé d'avoir des robots aussi intelligents que les humains, capables de nous aider dans les tâches ménagères, de discuter avec nous et même d'être aussi omnipotents que Jarvis dans Iron Man. Cependant, l’idéal est très complet et la réalité est très maigre. Apprendre à un robot à faire des choses ne peut pas se faire simplement en tapotant la tête. C'est aussi difficile que d'apprendre à raisonner à une petite amie, et cela peut ne pas être efficace même si cela demande beaucoup d'efforts.
Pourquoi ? Parce que le monde réel est trop complexe et plein d’accidents et de changements. Pensez-y, vous devez passer beaucoup de temps pour enseigner une vérité simple à votre petite amie, et encore moins enseigner à un robot sans pensée humaine ?
Les méthodes traditionnelles de formation des robots sont soit trop coûteuses , nécessitent des essais répétés dans le monde réel et peuvent entraîner des risques pour la sécurité, soit elles sont trop inefficaces et les robots formés dans des environnements simulés deviendront aveugles dès leur arrivée dans le monde réel, comme un robot. enfant mentalement retardé. Similaire.
Pour résoudre ce problème, des chercheurs de l'Université de Stanford ont eu une idée géniale : les cousins numériques .
Que sont les cousins numériques ?
En termes simples, les cousins numériques sont des substituts virtuels aux objets du monde réel . Vous pouvez le considérer comme un modèle numérique à haute imitation. Il ressemble à l'objet réel et a des fonctions similaires, mais il n'est pas nécessaire qu'il soit exactement le même .
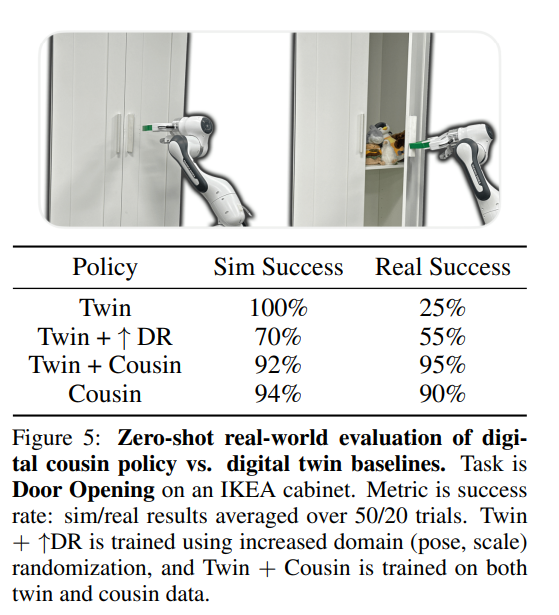
Par exemple, une armoire réelle et sa cousine numérique devraient avoir des poignées et une disposition de tiroirs similaires, mais les matériaux et les détails pourraient être différents. De même, une cuisine réelle et sa cousine numérique devraient avoir un placement de meubles similaire, mais le modèle spécifique peut différer légèrement.
Pourquoi se procurer ce cousin numérique car il présente deux énormes avantages :
Coûts réduits : les cousins numériques n’ont pas besoin de reproduire le monde réel avec autant de précision que les jumeaux numériques, ils sont donc plus simples et moins chers à fabriquer.
Robustesse améliorée : un objet réel peut avoir plusieurs cousins numériques, et ces cousins peuvent présenter des différences subtiles. Cela équivaut à fournir au robot des données d'entraînement plus diversifiées afin qu'il puisse apprendre à faire face à divers changements.
Comment générer automatiquement des cousins numériques ?
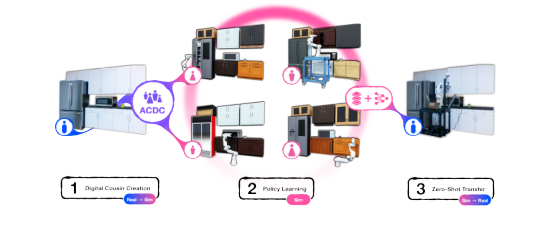
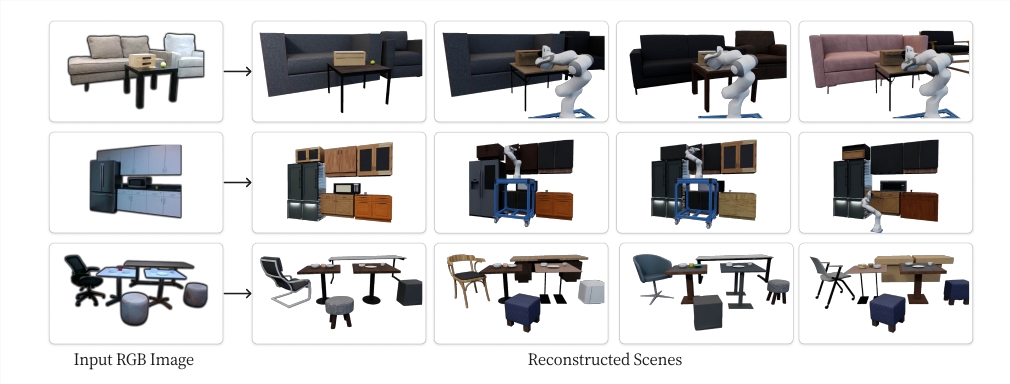
Des chercheurs de l'Université de Stanford ont développé un système appelé ACDC qui peut générer automatiquement des scènes numériques cousines à partir d'une seule image RVB . Ce système est une excellente nouvelle pour les paresseux. Il vous suffit de prendre une photo et il vous aidera à générer un terrain d'entraînement virtuel pour que votre robot puisse y jouer.
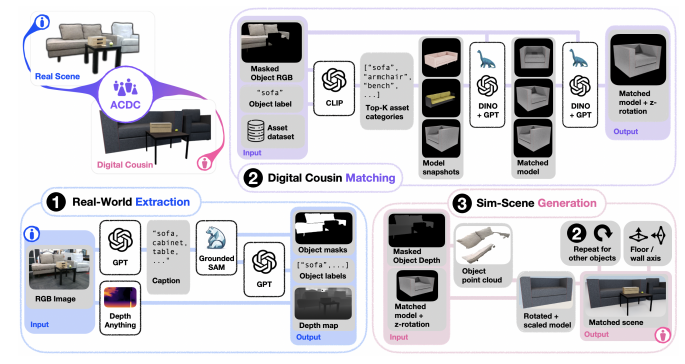
Le flux de travail du système ACDC est grossièrement divisé en trois étapes :
Extraire les informations : extrayez le masque de l'objet, les informations de profondeur, etc. de l'image RVB d'entrée.
Cousins correspondants : sur la base des informations extraites, recherchez le modèle numérique de la base de données qui ressemble le plus à l'objet réel et ajustez la taille et l'orientation du modèle en fonction de la catégorie et des caractéristiques de l'objet.
Générez des scènes : combinez des modèles numériques correspondants pour générer une scène virtuelle complète et effectuez des ajustements physiques pour garantir la stabilité et la rationalité de la scène.

Les cousins numériques fonctionnent-ils vraiment ?
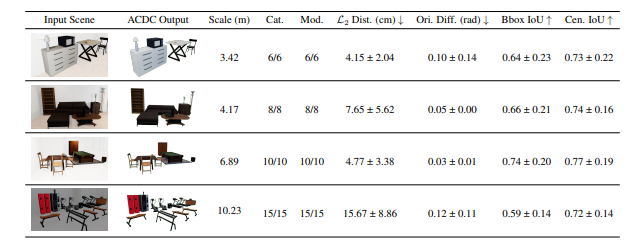
Des chercheurs de l'Université de Stanford ont mené une série d'expériences qui ont montré que les robots entraînés avec des cousins numériques étaient plus performants :
Environnement simulé : Dans un environnement simulé, les robots formés avec des cousins numériques ont un taux de réussite plus élevé lors de l'exécution de tâches telles que l'ouverture de portes, l'ouverture de tiroirs et le placement de bols, et sont plus adaptables aux différents modèles de meubles . En revanche, les robots entraînés avec des jumeaux numériques ont tendance à agir de manière stupide lorsqu’ils rencontrent des meubles qu’ils n’ont jamais vus auparavant.
Monde réel : dans le monde réel, les robots formés avec des cousins numériques peuvent être directement appliqués à des scénarios du monde réel sans ajustement supplémentaire . Les robots formés avec des jumeaux numériques nécessitent des ajustements supplémentaires pour s'adapter aux différences du monde réel.
L’émergence de la technologie cousine numérique a ouvert une nouvelle porte à l’apprentissage des robots. Les robots du futur seront plus intelligents, plus flexibles et mieux capables de s’adapter au monde réel complexe et en constante évolution.
Bien entendu, cette technologie présente encore certaines limites. Par exemple, le nombre et les types de modèles dans la base de données ne sont pas assez riches et la gestion de certaines situations particulières n'est pas assez parfaite. Mais avec les progrès de la technologie et l’accumulation de données, ces problèmes seront progressivement résolus.
Dans l’ensemble, la technologie cousine numérique a un brillant avenir et fera passer la robotique à un niveau supérieur. Dans un avenir proche, nous pourrons peut-être avoir des compagnons robots aussi intelligents que les humains.
Adresse du projet : https://digital-cousins.github.io/
Adresse papier : https://arxiv.org/pdf/2410.07408
La technologie « cousin numérique » proposée par l'Université de Stanford offre une nouvelle façon de penser pour la formation des robots, réduit les coûts, améliore l'efficacité et jette des bases solides pour des robots plus intelligents et plus flexibles à l'avenir. Je crois qu'avec le développement continu de la technologie, les « cousins numériques » favoriseront de plus grandes percées dans la technologie robotique et réaliseront à terme notre rêve d'une coexistence harmonieuse avec des robots intelligents.