Kode ini mengekstraksi rotasi dan segmentasi dunia Manhattan setempat dari gambar kedalaman secara real-time. Berikut adalah video demo untuk tiga urutan RGB-D yang berbeda: 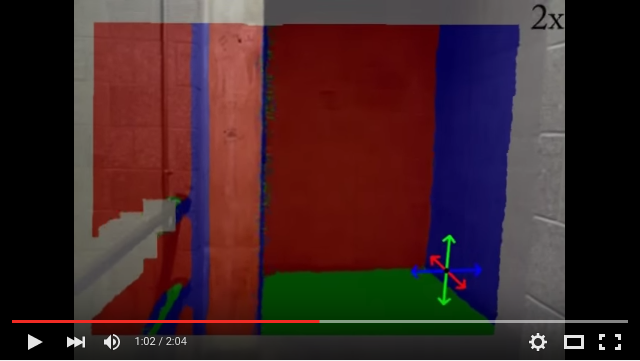
Jika Anda menggunakan kode ini untuk penelitian Anda, silakan kutip
Real-time Manhattan World Rotation Estimation in 3D (Julian Straub,
Nishchal Bhandari, John J. Leonard, John W. Fisher III), In IROS, 2015.
Kode ini tergantung pada perpustakaan lain berikut dan diuji di bawah Ubuntu 14.04.
Kernel GPU diuji pada NVIDIA Quadro K2000m dengan kemampuan komputasi 3.0.
Setelah Anda memiliki dependensi di tempatnya
make checkout && make configure && make
Ini akan checkout dependensi dari beberapa repositori saya yang lain (JScore, MMF, CUDEPCL) dan menyusun semuanya menjadi ./build/
Setelah menginstal perpustakaan, cobalah menjalankan yang berikut untuk menyimpulkan MF adegan sederhana mengikuti asumsi dunia Manhattan:
./pod-build/bin/realtimeMF -i data/MIT_hallway_1_d.png -o MIT_hallway_1 -d
Akan ada file .csv.
libcudapcl.so mengumpulkan semua kode CUDA menjadi satu perpustakaan bersama. Sisa kode dalam bentuk file header.
Allowed options:
-h [ --help ] produce help message
-m [ --mode ] arg mode of the rtmf (direct, approx, vmf)
-i [ --in ] arg path to input file
-o [ --out ] arg path to output file
-d [ --display ] display results
-B [ --B ] arg B for guided filter
-T [ --T ] arg number of iterations
--eps arg eps for guided filter
-f [ --f_d ] arg focal length of depth camera
--nCGIter arg max number of CG iterations
--dt arg steplength for linesearch
--tMax arg max length for linesearch
Allowed options:
-h [ --help ] produce help message
-m [ --mode ] arg mode of the rtmf (direct, approx, vmf)
-o [ --out ] arg path to output file
-d [ --display ] display results
-B [ --B ] arg B for guided filter
-T [ --T ] arg number of iterations
--eps arg eps for guided filter
-f [ --f_d ] arg focal length of depth camera
--nCGIter arg max number of CG iterations
--dt arg steplength for linesearch
--tMax arg max length for linesearch


